

Fully decoupled three-rotation three-movement six-degree-of-freedom hybrid mechanism
A technology of complete decoupling and hybrid mechanism, applied in the field of robotics, can solve the problems of complex structure and very little research on decoupled hybrid mechanism, and achieve the effect of high motion precision, high stiffness and simple control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
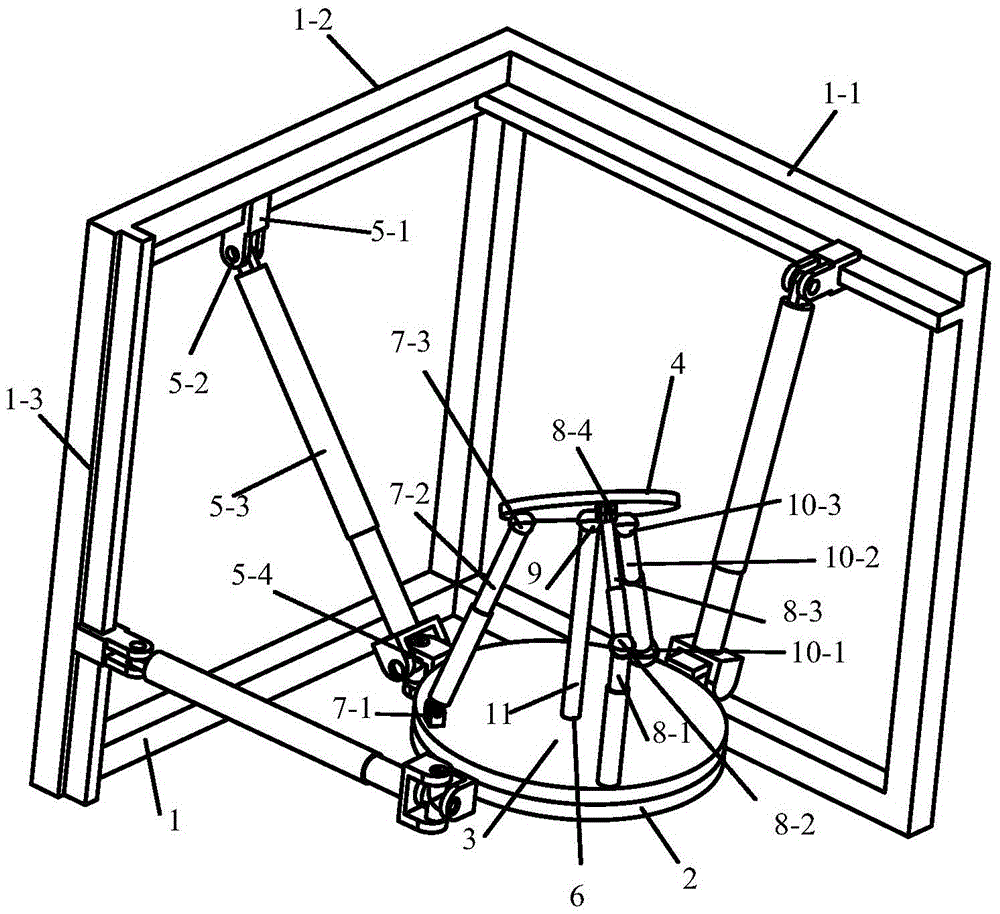
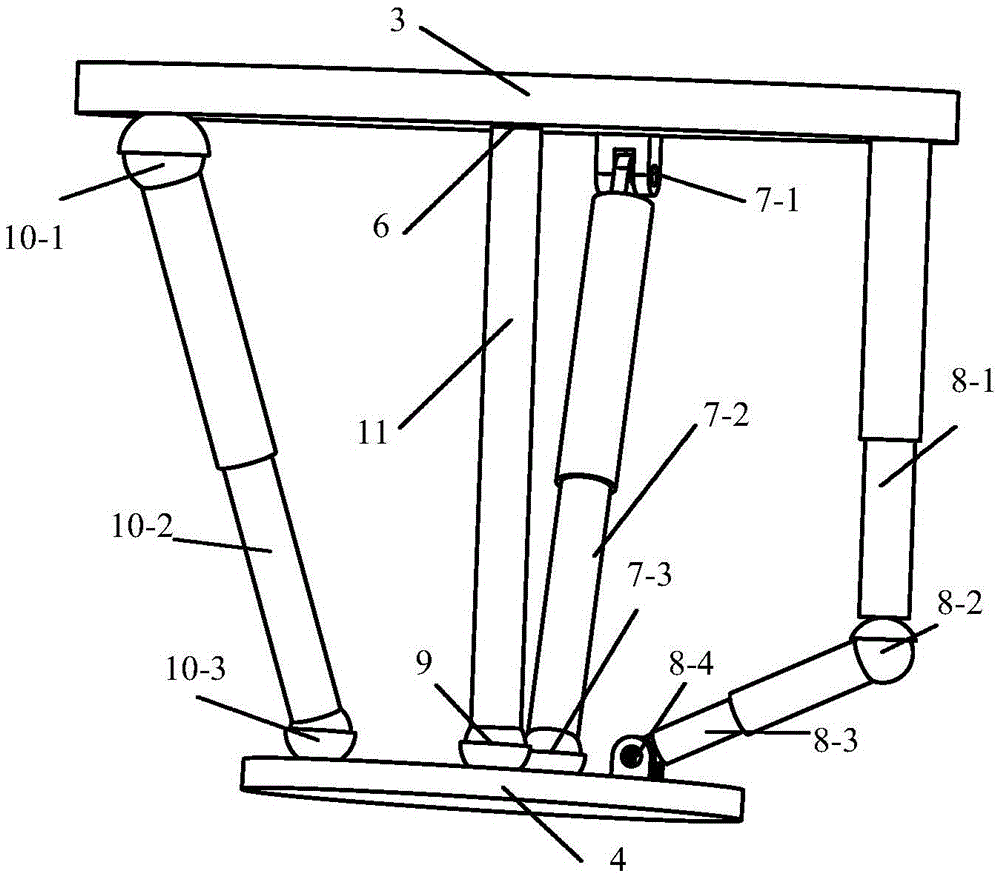
[0017] as attached figure 1 As shown, the fully decoupled three-rotation three-movement six-degree-of-freedom hybrid mechanism consists of a machine base 1, a middle platform 1 2, a middle platform 2 3, a moving platform 4 and the branches connecting them. The machine base 1 and the middle platform 1 and 2 are connected by three PRPU branches with the same structure, the middle platform 1 2 and the middle platform 2 3 are connected by an R pair, the middle platform 2 3 and the moving platform 4 are connected by the S branch and the RPS branch , the PSPR branch and the four branches of the SPS branch are connected.
[0018] as attached figure 1 As shown, the base 1 and the intermediate platform 1 are connected by three PRPU branches with the same structure, and the branches include a linear drive movement pair 5-1, a rotation pair 5-2, a linear movement pair 5-3 and a ten thousand To the hinge 5-4, the guide rails of the three linear drive moving pairs 5-1 are respectively pa...
Embodiment 2
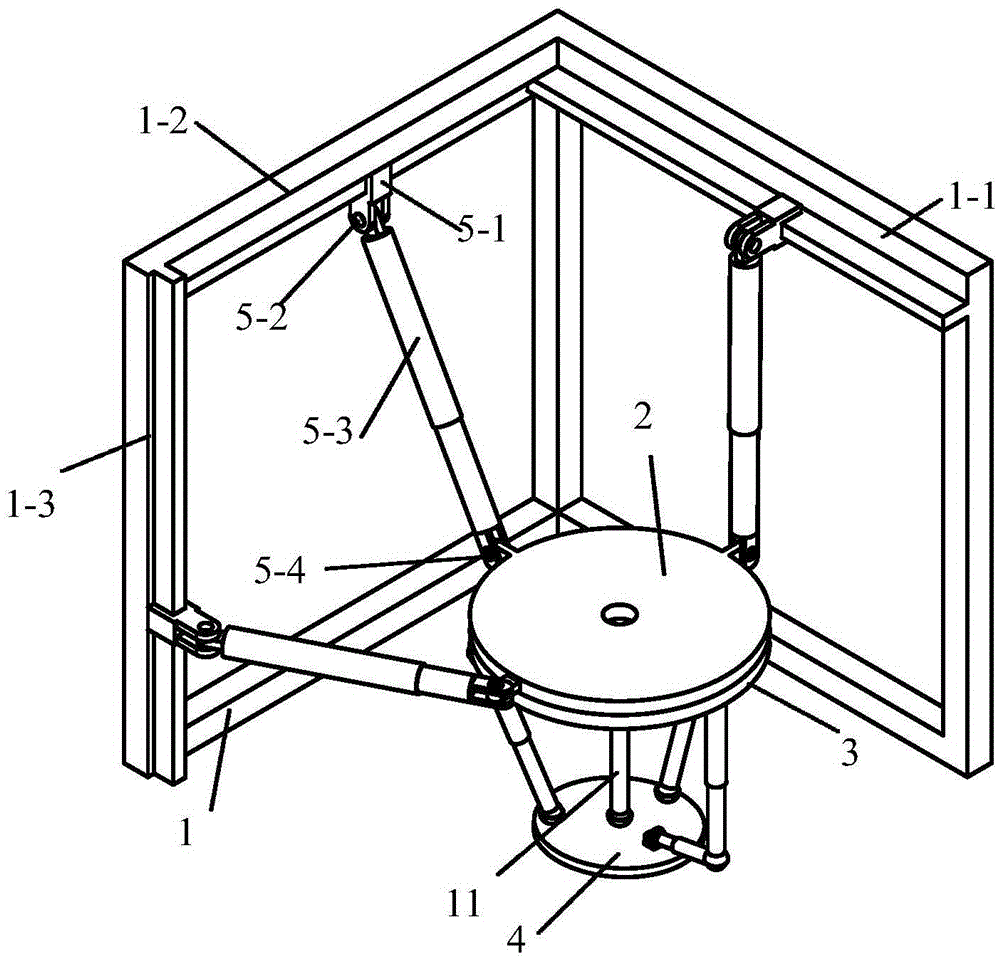
[0021] as attached image 3 As shown, the base 1 and the intermediate platform 1 are connected by three PRPR branches with the same structure, and the branches include a linear drive movement pair 5-1, a rotation pair 5-2, a linear movement pair 5-3 and a rotation Auxiliary 3 5-4', the guide rails of the three linear drive moving sub 5-1 are respectively parallel to the three mutually perpendicular directions of the crossbeam 1-1, the vertical beam 1-2 and the longitudinal beam 1-3 on the base 1, Rotating pair 1 5-2 is parallel to the guide rail of linear drive moving pair 5-1 and perpendicular to linear moving pair 5-3, rotating pair 3 5-4' is connected to intermediate platform 1 2 and is parallel to rotating pair 1 5-2, The three revolving pairs on the middle platform one 2 are distributed in a circle and are orthogonal to each other. Other components and connections are the same as in Embodiment 1.
Embodiment 3
[0023] as attached Figure 4As shown, the base 1 and the intermediate platform 1 are connected by three PRRU branches with the same structure, and the branches include a linear drive moving pair 5-1, a rotating pair 5-2, a rotating pair 2 5-3' and The universal hinge 5-4, the guide rails of the three linear drive moving pairs 5-1 are respectively parallel to the three mutually perpendicular directions of the beam 1-1, the vertical beam 1-2 and the longitudinal beam 1-3 on the base 1, Rotating pair 1 5-2 and rotating pair 2 5-3' are all parallel to the guide rail of linear drive moving pair 5-1, and the two rotating pairs of universal hinge 5-4 are orthogonal to each other, and the inner side of universal hinge 5-4 The rotary pair is parallel to the second rotary pair 5-3', the outer rotary pair of the universal hinge 5-4 is connected with the intermediate platform one 2, and the outer rotary pairs of the universal hinge are distributed in a circle on the intermediate platform ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More