

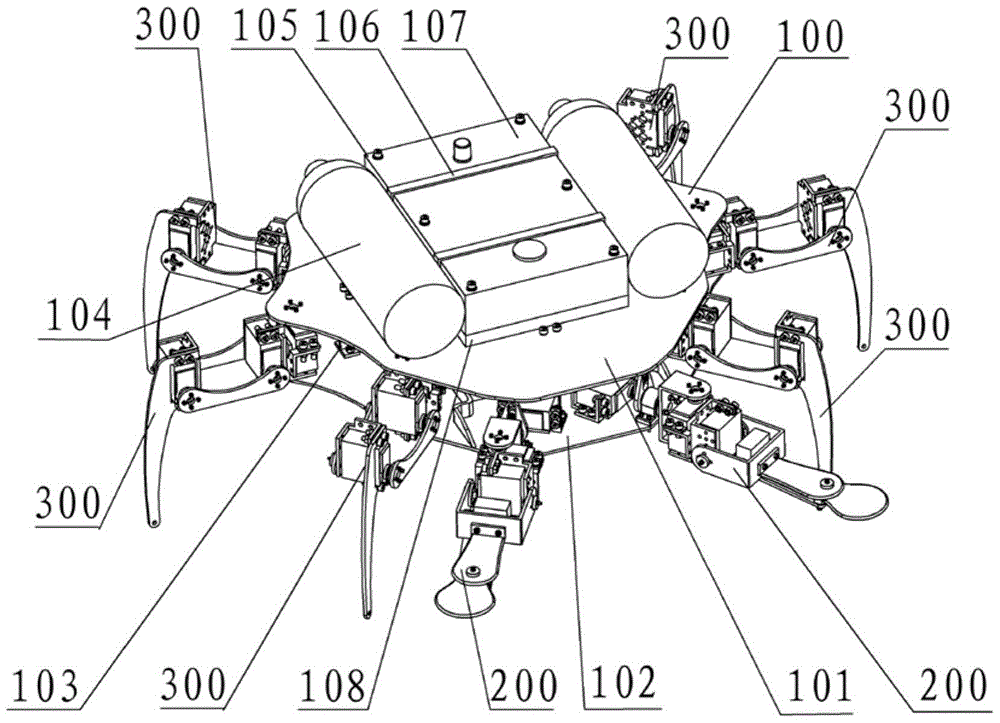
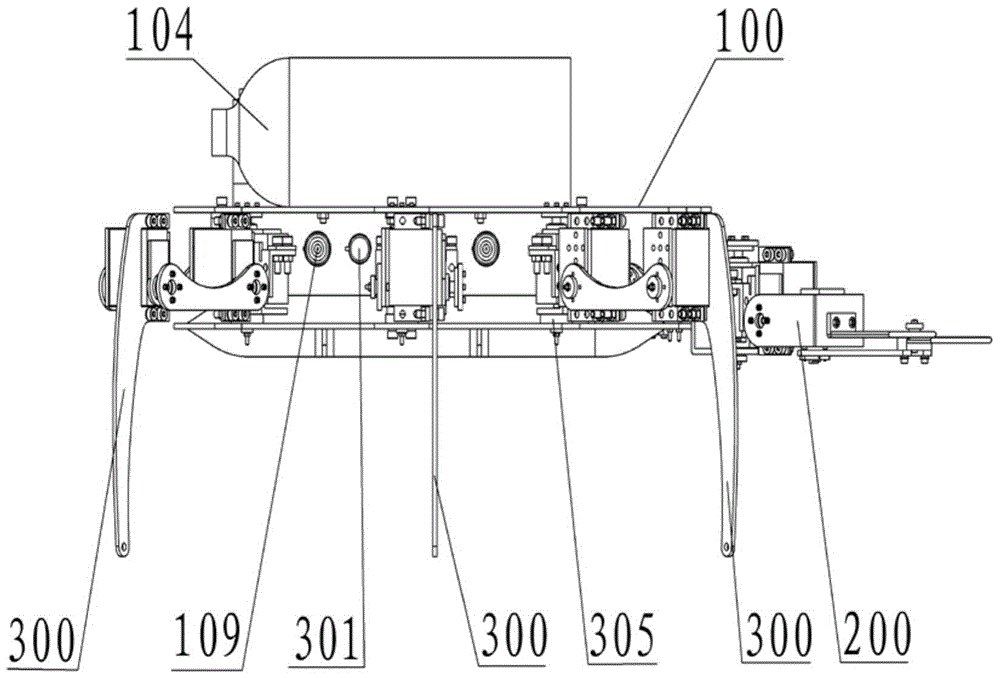
An amphibious multi-legged robot driven by foot-paddle coupling
A multi-legged robot and coupling drive technology, which is applied in amphibious vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of rubber coat corrosion, limit the movement range of robot joints, and is not suitable for underwater platforms, so as to improve environmental adaptability The effects of ability, rich movement patterns, and good exploration ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0041] The amphibious multi-legged robot of the present invention can realize land crawling, water floating, underwater crawling or water pedaling-swimming in an amphibious environment.
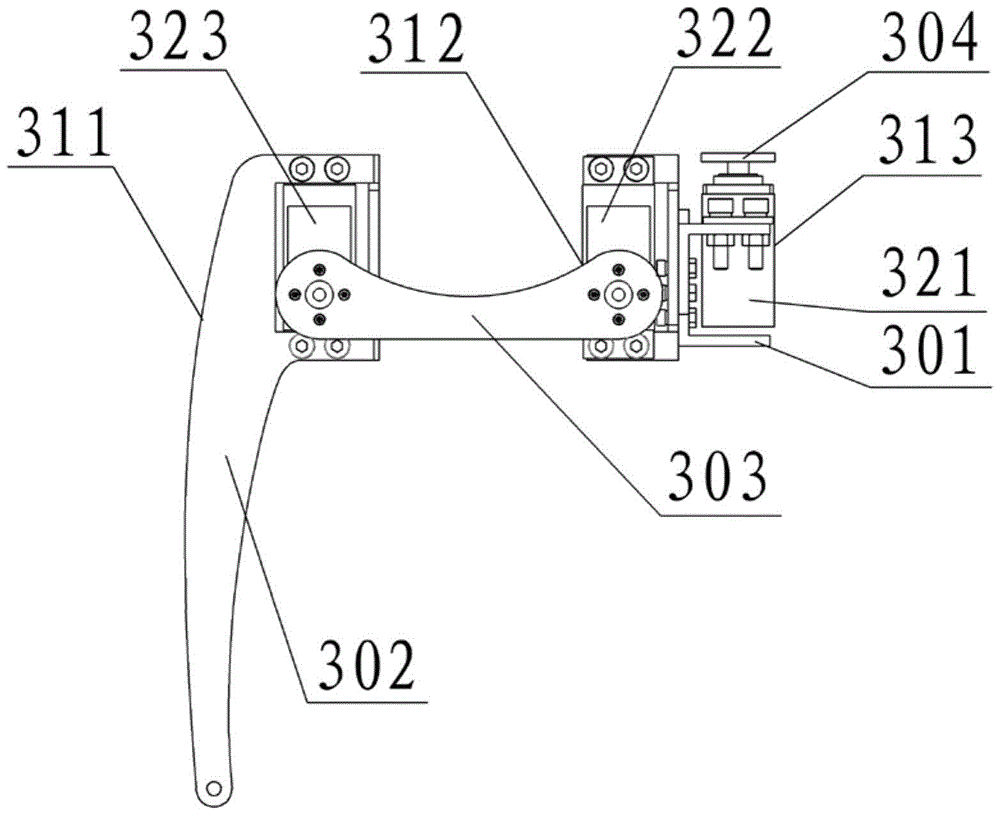
[0042] During work, the driving motor of the first joint of the swimming paddle can 211 make the swimming paddle roll left and right, the driving motor of the second joint of the swimming paddle can 212 make the swimming paddle shake back and forth, the third joint driving motor 213 of the swimming paddle can make the swimming paddle flap up and down, and the swimming paddle The fourth joint drives the motor 214 to shake the empennage 207 back and forth, and the joints connected in series transmit the motion in sequence, finally producing a compound motion similar to the flapping of the swimming paddles of biological sea crabs. By controlling the phase difference of each joint movement, different underwater dynamic effects can be produced.
[0043] like Figure 7 , 8 As shown, floating in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More