

Vehicle driving trace predicating and lane deviation evaluating method
An evaluation method and vehicle trajectory technology, applied in two-dimensional position/course control and other directions, can solve the problems of not fully considering the driver's driving behavior characteristics and differences, and achieve the effect of improving active safety and improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
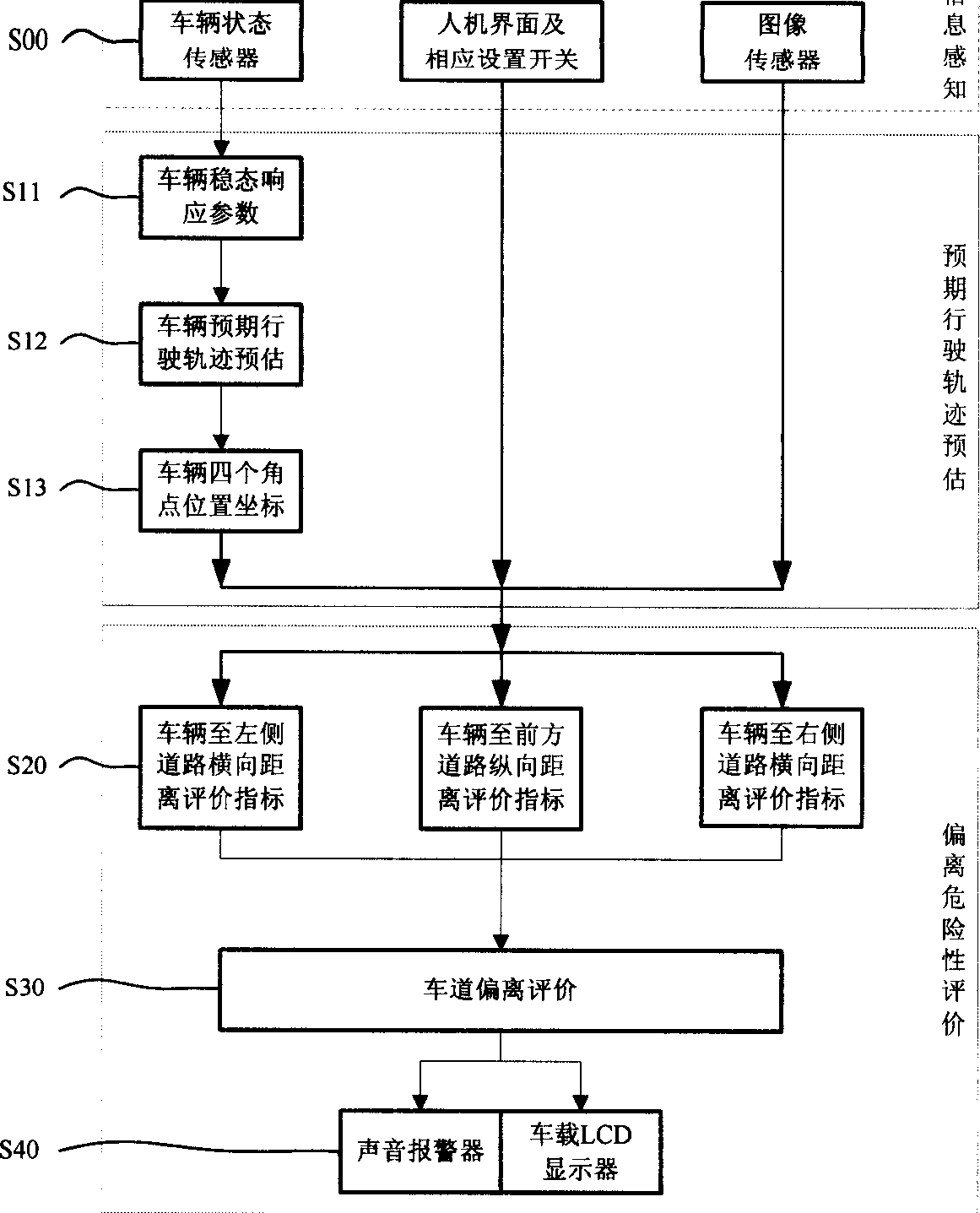
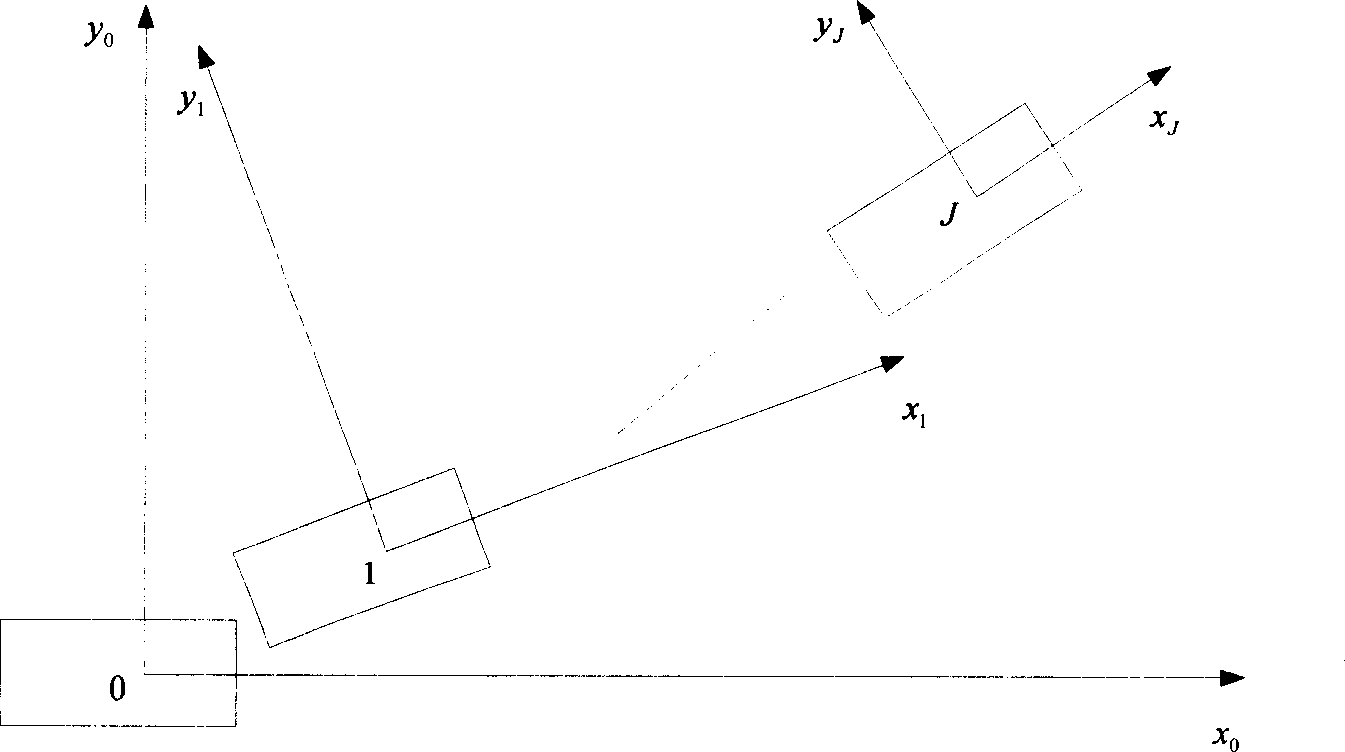
[0021] First, in step S00, the system obtains the parameters of the car at the current moment t from the on-board sensors: the longitudinal speed of the car lateral velocity Steering wheel angle δ sw , accelerator opening or brake pedal travel ratio α (when the car is in the driving condition, α is a positive value or equal to 0, indicating the accelerator opening, at this time 0%≤α≤100%; when the car is in the braking condition , α is a negative value, indicating the brake pedal travel ratio, at this time -100%≤α And the lane marking line information is in the car body coordinate system (with the center of mass of the car as the origin, the x-axis moves forward along the longitudinal axis of the car, the y-axis goes to the left, and the z-axis goes up vertically, refer to figure 2 ), so the longitudinal position x of the car at time t in the same coordinate system 0 , horizontal position y 0 and roll angle 0 are all zero.
[0022] Secondly, in step S11, according t...
Embodiment 2
[0072] like Figure 8 As shown in the flow chart:
[0073] First, use the image sensor to collect road images, process them, and obtain the lane marking information of the road ahead. At the same time, the state parameters of the vehicle, such as speed, lane change signal, steering wheel angle, position of the accelerator pedal or brake pedal, etc., are collected through the on-board sensors to obtain the necessary input information.
[0074] Then, according to the lane-changing signal, it is judged whether the car is changing lanes. If the car is changing lanes, the system will stop working; if the car is not in the process of changing lanes, the system will use the steady-state response characteristics of the car to estimate The driving trajectory is estimated, the vehicle state parameters of the expected trajectory points are obtained, and the position coordinates of the four corners of the vehicle are calculated.
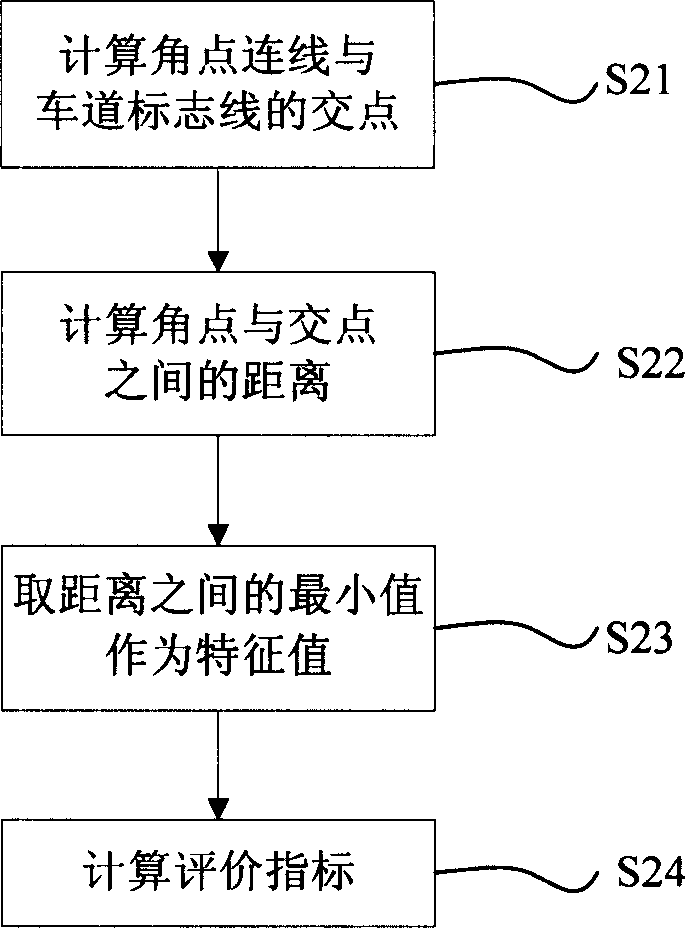
[0075] Secondly, according to the position coordinates o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More