

Underwater sound multi-target autonomous detection and orientation tracking method
A target orientation and multi-target technology, applied in the field of underwater acoustic multi-target autonomous detection and azimuth tracking, can solve the problems of multiple target azimuths approaching each other, uncertain interruptions and outliers, track intersections, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0092] The specific embodiment of the present invention will be further described in detail below in conjunction with the test data on a certain lake and the accompanying drawings.
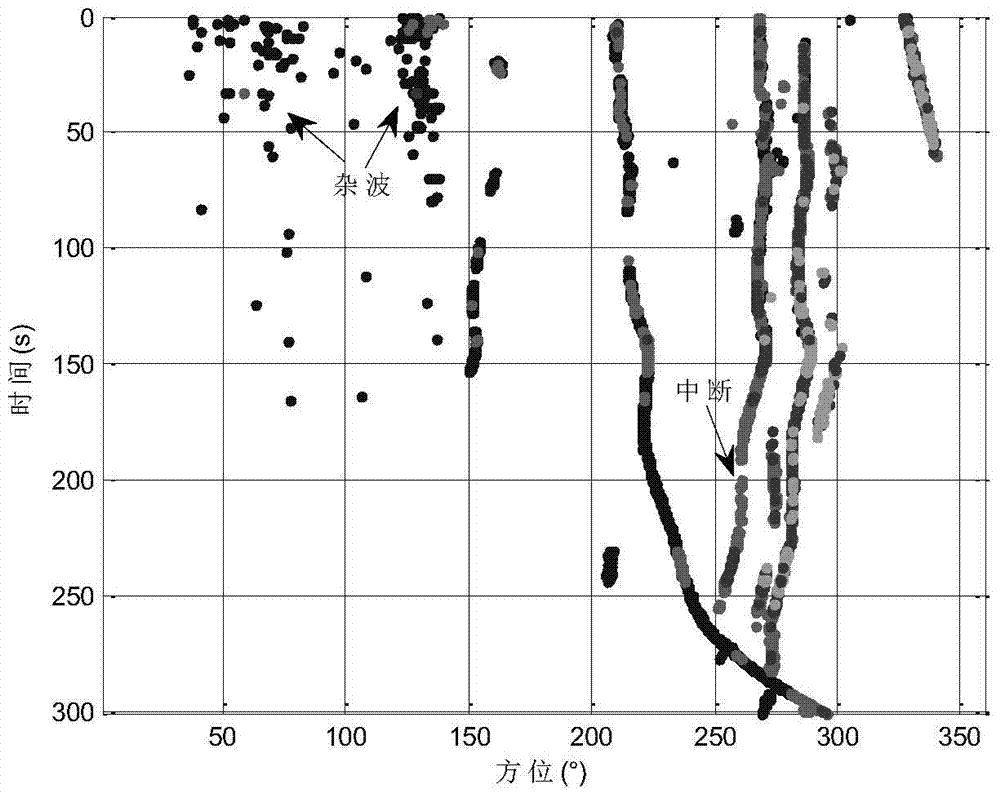
[0093] The azimuth course obtained by processing the sonar of an unmanned aerial vehicle as input data, as attached Figure 4 As shown, the time length of each shot of data is 68ms, the duration of the entire data is 300s, and a total of 4410 shots of beam data.
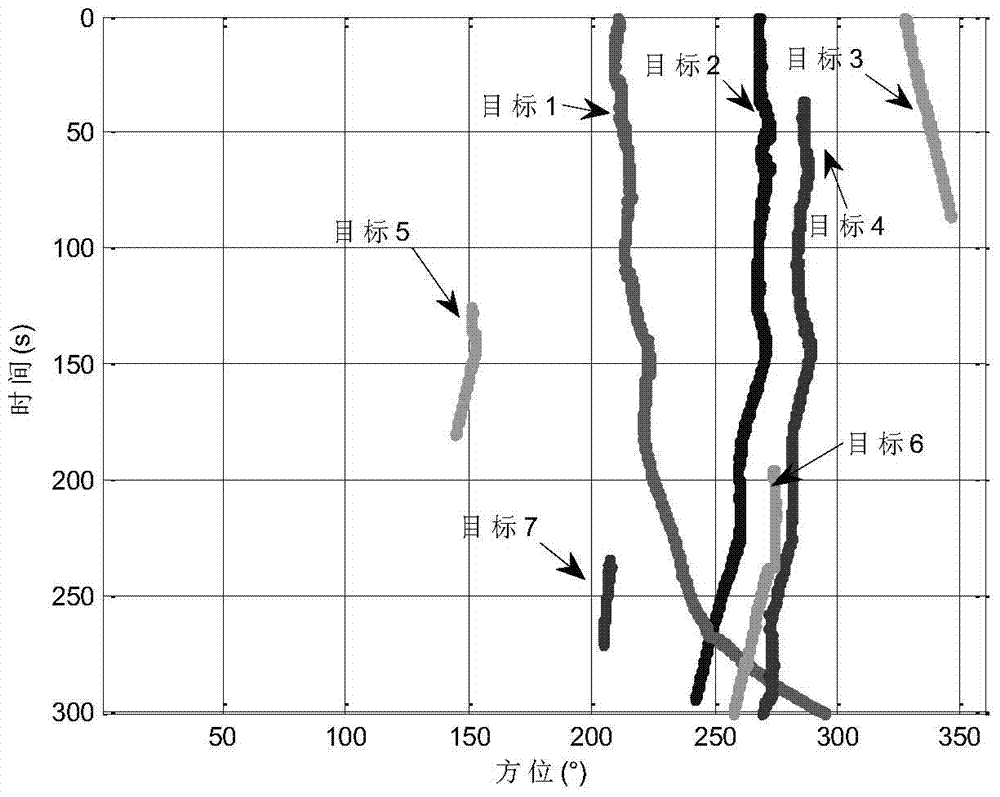
[0094] The multi-target azimuth tracking method without manual intervention is used to carry out autonomous azimuth tracking on this piece of data. The specific steps are as follows:
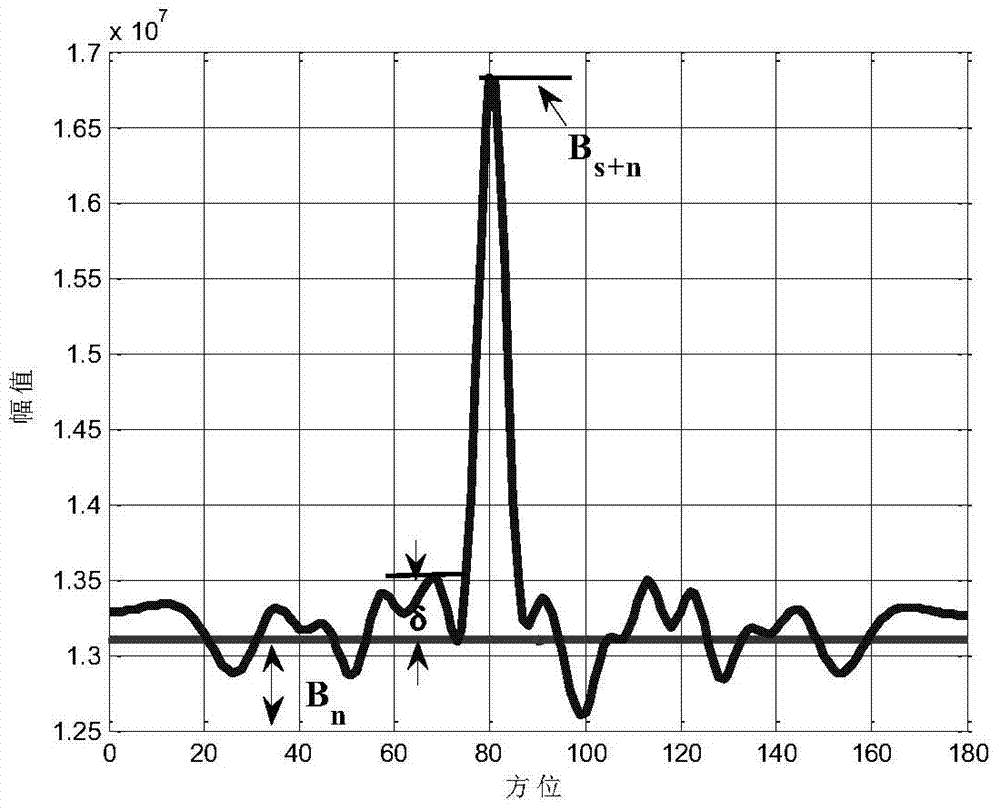
[0095] Step 1: The current moment is t k , the beam curve is denoted as B i (t k )(i=1,2,…,180°), it performs autonomous orientation detection. First calculate the mean E[B of the beam curve i (t k )] and variance δ[B i (t k )], and then calculate each orientation detection coefficient
[0096] DT [ B ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More