

Hand exoskeleton
An exoskeleton and finger technology, applied in the direction of manipulators, program-controlled manipulators, passive exercise equipment, etc., can solve problems such as angle changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In the following description, an embodiment of the hand exoskeleton device according to the present invention will be discussed in detail, and different aspects of the present invention will be discussed.
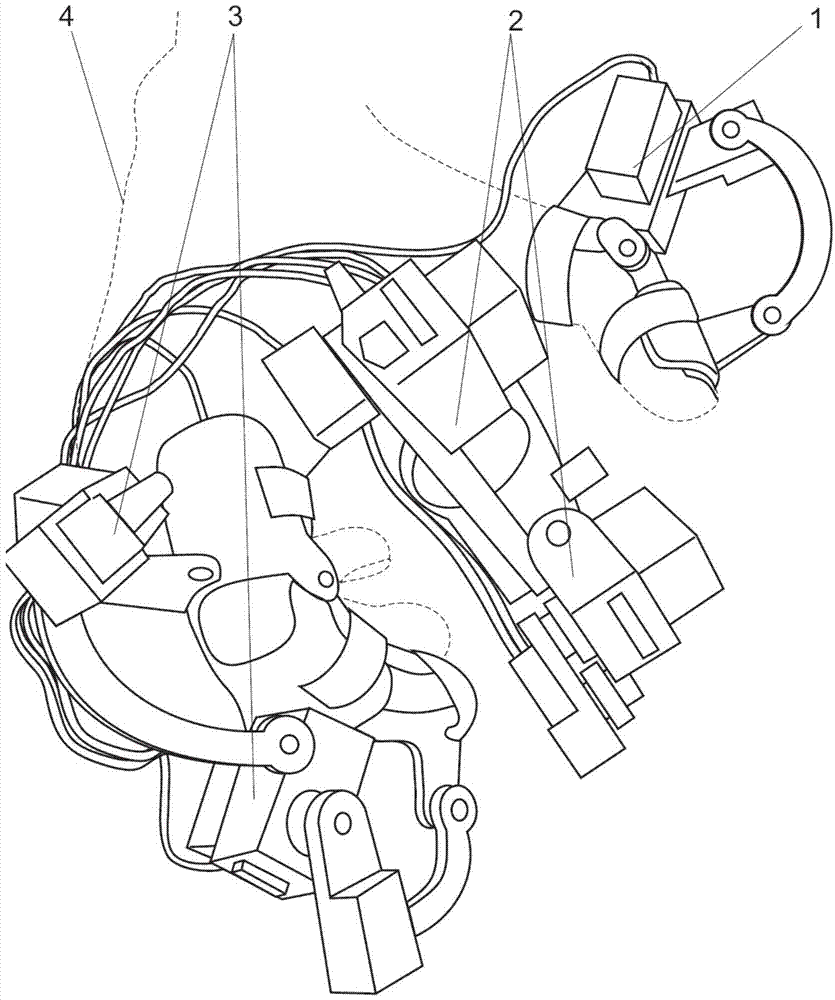
[0034] like figure 1 As shown, the hand exoskeleton device includes three automatic units (1, 2, 3), where the one attached to the thumb of the hand (4) is marked with a number (1), and the one attached to the index finger is marked with a number (2). Attachment to the middle finger is marked with a number (3).
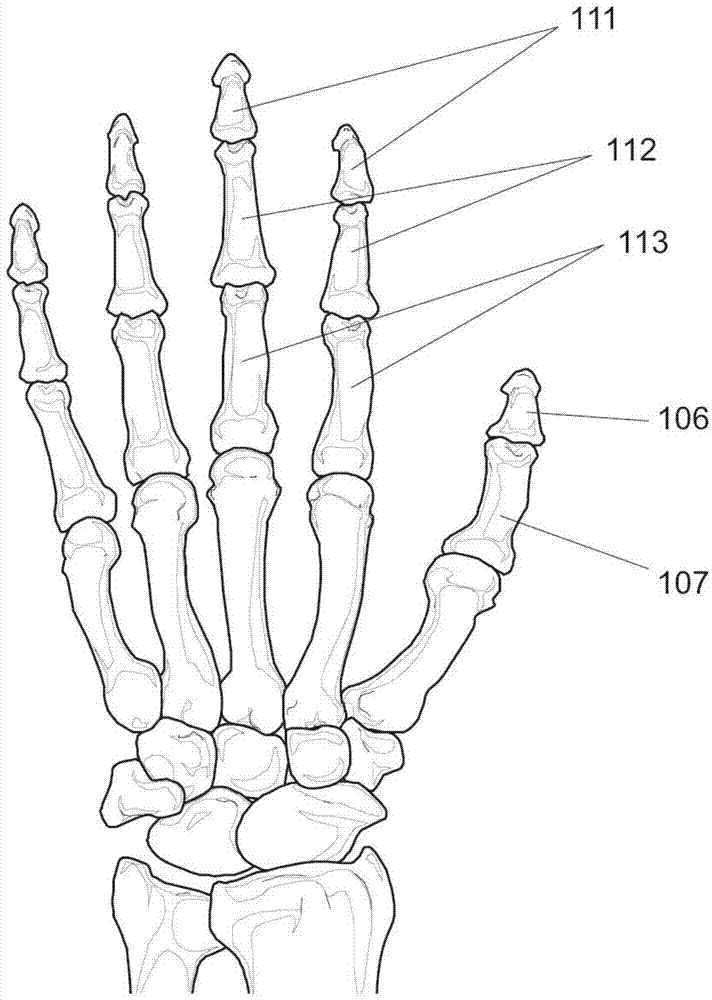
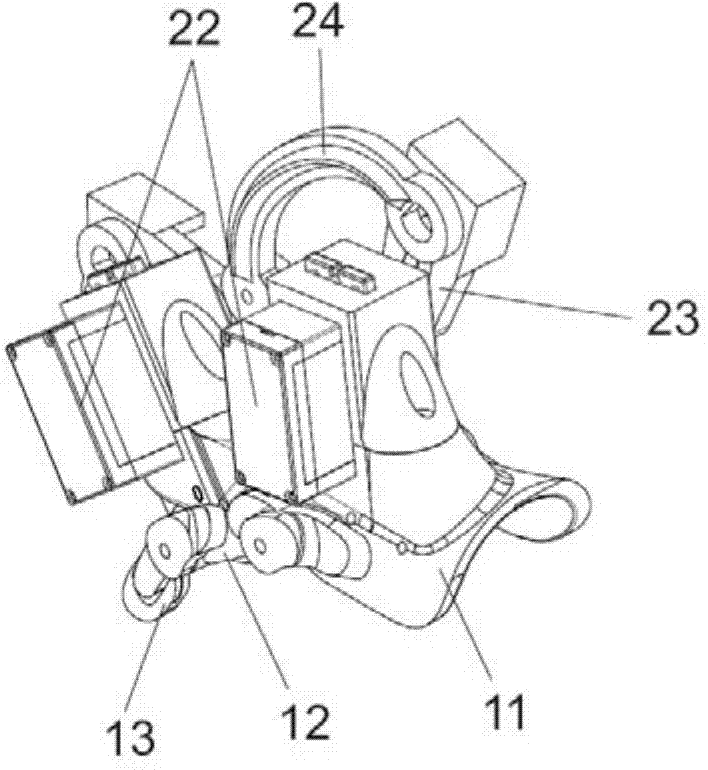
[0035]The automatic unit (1) attached to the thumb has two elements (6, 7) for attachment to the distal (106) and proximal (107) phalanx of the thumb (see figure 2 ). Each of the automatic units (2, 3) attached to the index and middle fingers has three elements (11, 12, 13) for use with the associated distal phalanx (111), middle The phalanx (112) and proximal phalanx (113) are attached.
[0036] Each element has as Figure 11 The basic form shown has ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More