

Multi-robot path planning method based on multi-objective artificial bee colony algorithm
An artificial bee colony algorithm and path planning technology, applied in the direction of two-dimensional position/channel control, etc., can solve the conflict between path length, path safety and smoothness, cannot meet the needs of robot path planning, and is difficult to achieve simultaneous optimization And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings.
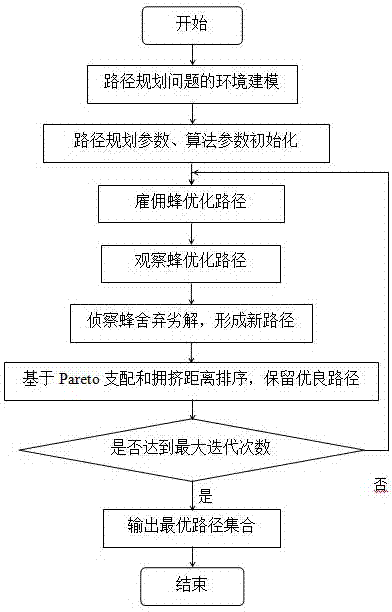
[0051] A kind of multi-robot path planning method based on the multi-objective artificial bee colony algorithm proposed by the present invention, such as figure 1 As shown, it specifically includes the following optimization steps:
[0052] Step 1: Environment Modeling
[0053] 1. Environmental modeling for path planning problems:
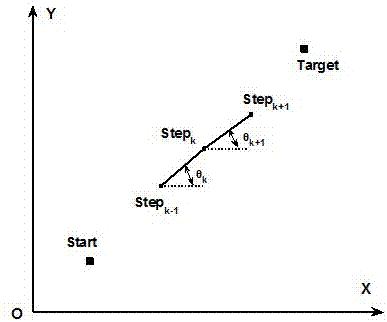
[0054] Such as figure 2 As shown, the path planning environment is set to a two-dimensional plane, and the global coordinate system O-XY of the environment map is established; Start is the starting point of the robot, and Target is the target point of the robot. The path of the robot can be expressed in the environment map as a set of starting point, target point and n path points passed in the middle: Path={Start,Step 1 ,Step 2 ,...,Step n ,Target}. Among them, set P={Step 1 ,Step 2 ,...,Step n} is the optimization goal of path ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More