

3D point cloud acquisition method based on Gray code structure light and polar constraints
An epipolar constraint, three-dimensional point cloud technology, applied in image data processing, instruments, calculations, etc., can solve problems such as cumbersome process and poor flexibility, and achieve the effect of ensuring accuracy, convenient acquisition, and simplifying matching problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The specific implementation manners of the present invention will be further described in detail below in conjunction with the drawings and examples.
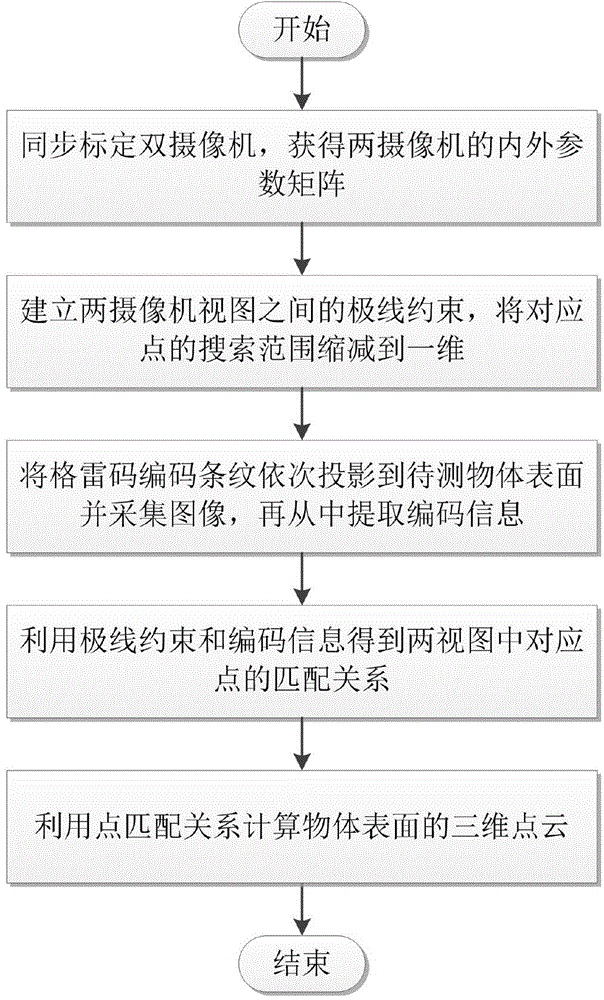
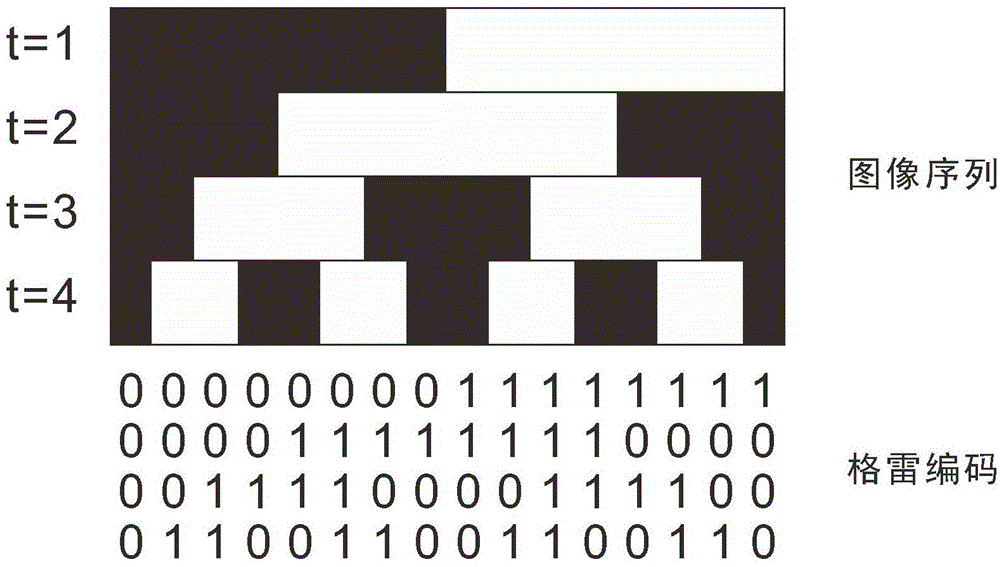
[0065] The method of the present invention is based on the principles of the binocular stereo vision method and the coded structured light method, and proposes a three-dimensional point cloud acquisition method based on Gray code structured light and epipolar constraints. First, the dual cameras are calibrated synchronously to obtain the internal and external parameter matrices of the two cameras; then, based on the calibration results, the epipolar constraints between the views of the two cameras are established, and the search range of corresponding points is reduced to one dimension; then, the gray coded stripe Sequentially project onto the surface of the object to be measured and collect images, and then extract the encoded information; then, use the epipolar constraints and encoded information to obtain the matching ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More