A Method for Determining Traffic Flow Trajectories at Intersections
A traffic flow and intersection technology, applied in the direction of traffic flow detection, etc., can solve the problems of non-motor vehicles and pedestrians, and achieve the effect of reducing personal casualties and property losses, improving traffic order and efficiency, and reducing exhaust emissions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0022] A method for determining the trajectory of traffic flow at an intersection is characterized by comprising the following steps:
[0023] 1) Obtain several images by collecting video files, and use the view software to obtain the coordinates of any kind of traffic flow in the image coordinate system at any time from the collected images, that is, the image coordinates (x t ,y t );
[0024] 2) Establish traffic flow image coordinates (x t ,y t ) and its corresponding actual coordinates (x d ,y d ) between the mutual conversion relationship:
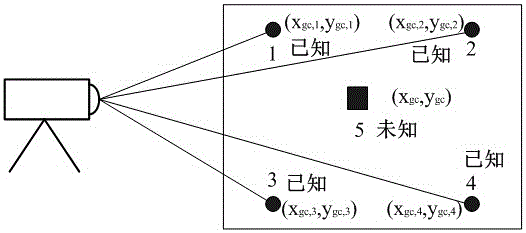
[0025] a. Select 4 known feature points for calibration by on-site measurement, and establish a coordinate system by measuring the size to obtain the actual coordinates of the calibration points, that is (x gc,1 ,y gc,1 ),(x gc,2 ,y gc,2 ),(x gc,3 ,y gc,3 ),(x gc,4 ,y gc,4 ), and its corresponding image coordinates can be obtained directly through the view software, namely (x ic,1 ,y ic,1 ),(x ic,2 ,y ic,1 ),(x ic,3 ...
Embodiment 2
[0029] Taking the intersection of Wenchang Road and North University Road in Yangzhou City as an example, the steps to determine the trajectory of non-motorized vehicles at this intersection are as follows:
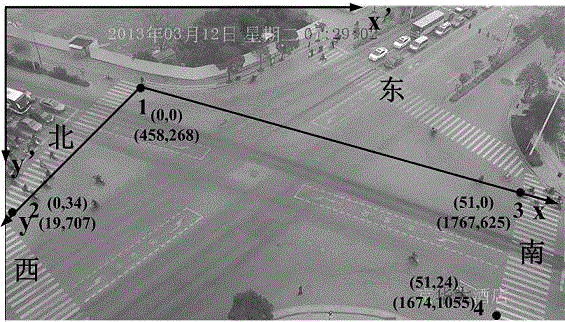
[0030] 1) Select 4 calibration points that can surround the research area, and the positions and coordinates of the 4 calibration points are shown in figure 2 :
[0031] Through the processing of the image file (view software) and the actual measurement of the intersection, the image coordinates (pixels) and actual coordinates (m) of the calibration point are respectively x ic,1 =458,y ic,1 =268,x ic,2 =19,y ic,2 =707,x ic,3 =1767,y ic,3 =625,x ic,4 =1674,y ic,4 =1055;x gc,1 =0,y gc,1 =0,x gc,2 =0,y gc,2 =34,x gc,3 =51,y gc,3 =0,x gc,4 =51,y gc,4 = 24;
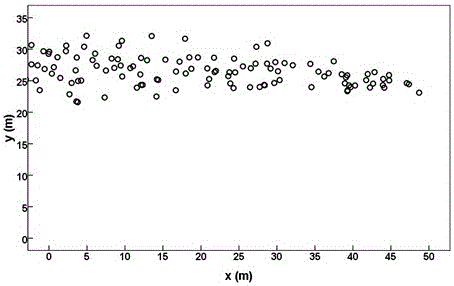
[0032] 2) Select a representative 5-min interval in the video file as the research time period, collect 1 picture every 1 s, and collect 300 pictures in total, and draw all the actual coordinates inside t...
Embodiment 3
[0034] A method for determining the trajectory of traffic flow at an intersection, comprising the steps of:
[0035] 1) By collecting continuous dynamic images of traffic flow, the coordinates of traffic individuals in the image coordinate system can be obtained through the corresponding view software, that is, the image coordinates (x t ,y t );
[0036] 2) Select 4 known feature points for calibration by on-site measurement, and establish a coordinate system by measuring the size to obtain the actual coordinates of the calibration points (x d ,y d ), its corresponding image coordinates can be obtained by image software;
[0037] 3) According to the conversion formula of actual coordinates and image coordinates, namely The actual coordinates of traffic individuals at any position in the image can be obtained, where c 1 -c 8 is the coefficient of matrix conversion, which can be obtained from the image coordinates and actual coordinates of 4 known calibration points;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com