

A Robust Control Method for Planetary Dynamic Descending Section Based on Thruster Error Compensation
A technology of power descent and robust control, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of actuator error, thruster actuator error, reduction of landing accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
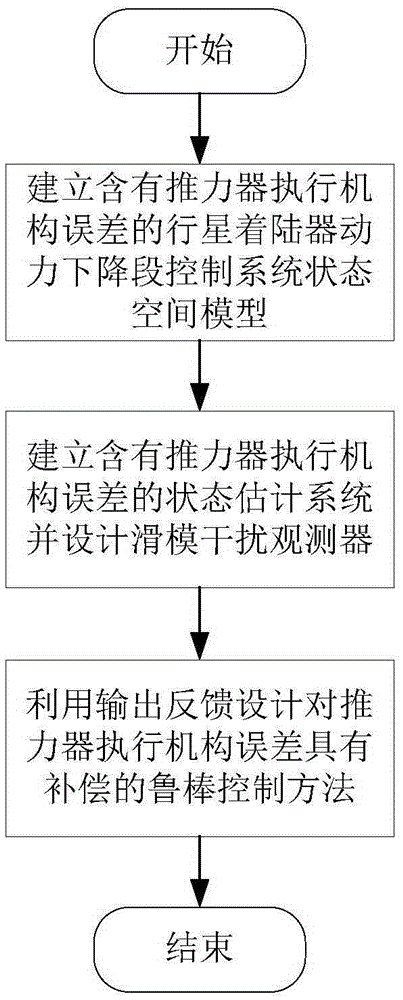
[0024] Such as figure 1 Shown, the specific implementation steps of the present invention are as follows (below taking the power descent process of the Mars lander as an example to illustrate the specific realization of the method)
[0025] 1. Establish a state-space model of the control system of the Mars lander's power descent section including the error of the thruster actuator
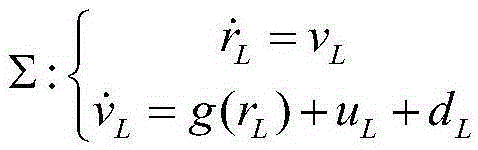
[0026] Set the position and velocity variables of the Mars lander to be established in the Cartesian coordinate system, the origin o is located at the target landing point on the surface of Mars, the x-axis and the y-axis are perpendicular to each other, the xoy plane is parallel to the surface of Mars, and the z-axis is defined by the target landing point o pointing in the direction opposite to the center of mass of Mars; assuming that this coordinate system is inertial, then the state space model Σ of the Mars lander power descent section system including the error of the thruster actuator is:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More