

A Construction Mechanism of Probabilistic Indoor Obstacle Distribution Map
An obstacle and distribution map technology, which is applied in the field of obstacle distribution map construction, can solve the problems of obstacle distribution map, cannot be built irregularly indoors, and it is difficult for robots to quickly detect boundaries, etc., and achieves a simple and feasible construction method. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
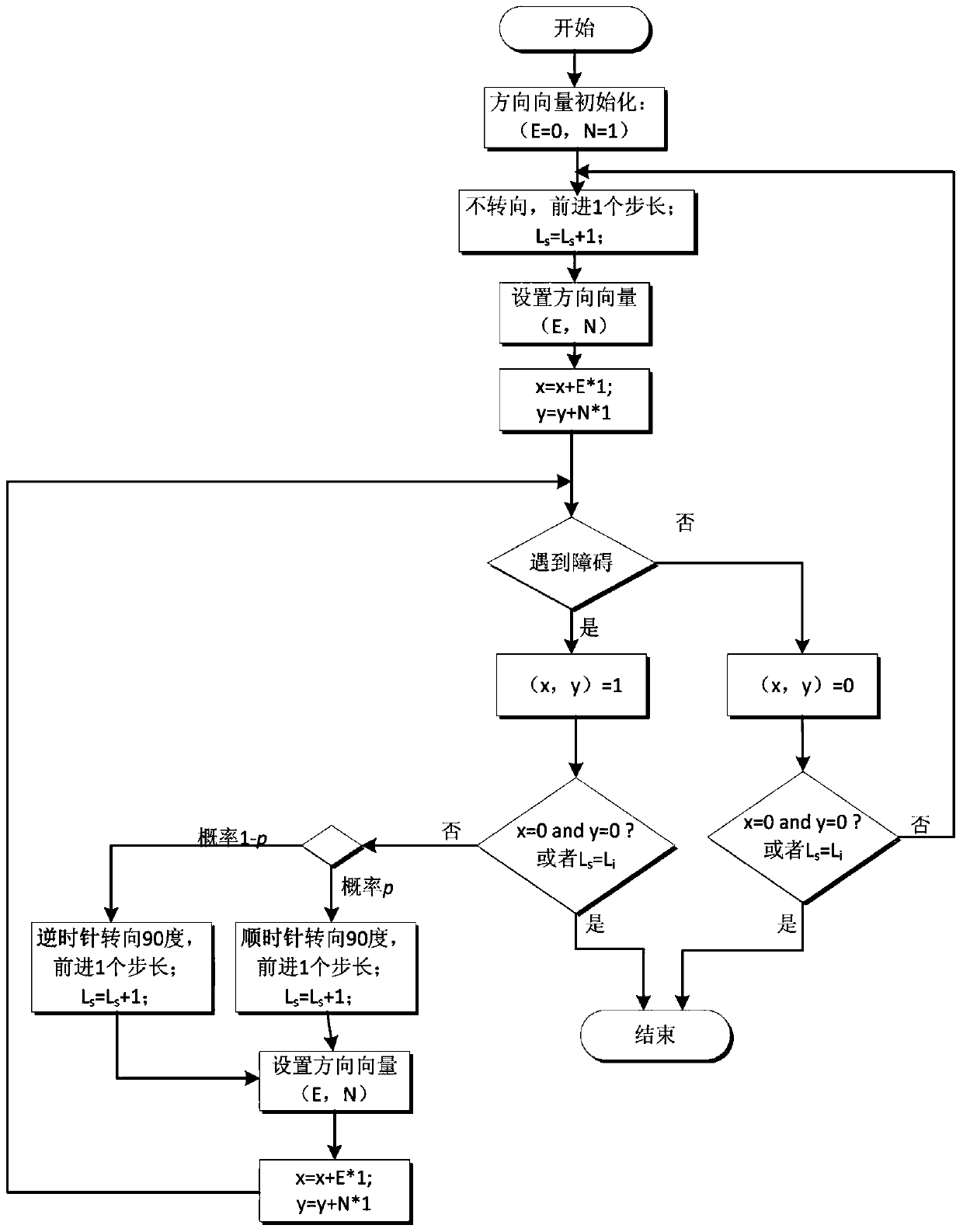
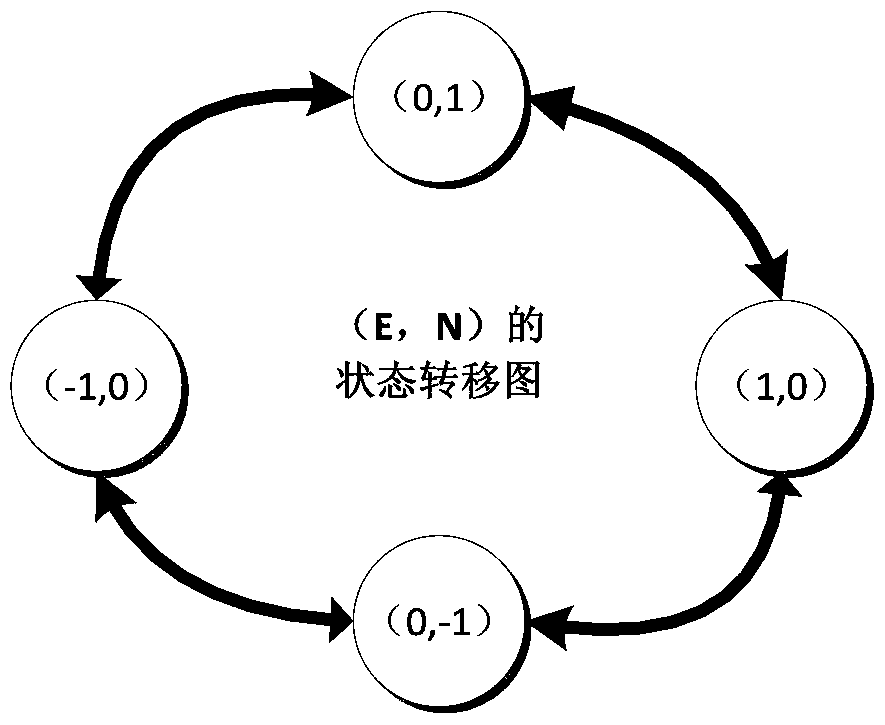
[0026] A construction mechanism of probabilistic indoor obstacle distribution map, including the following steps:
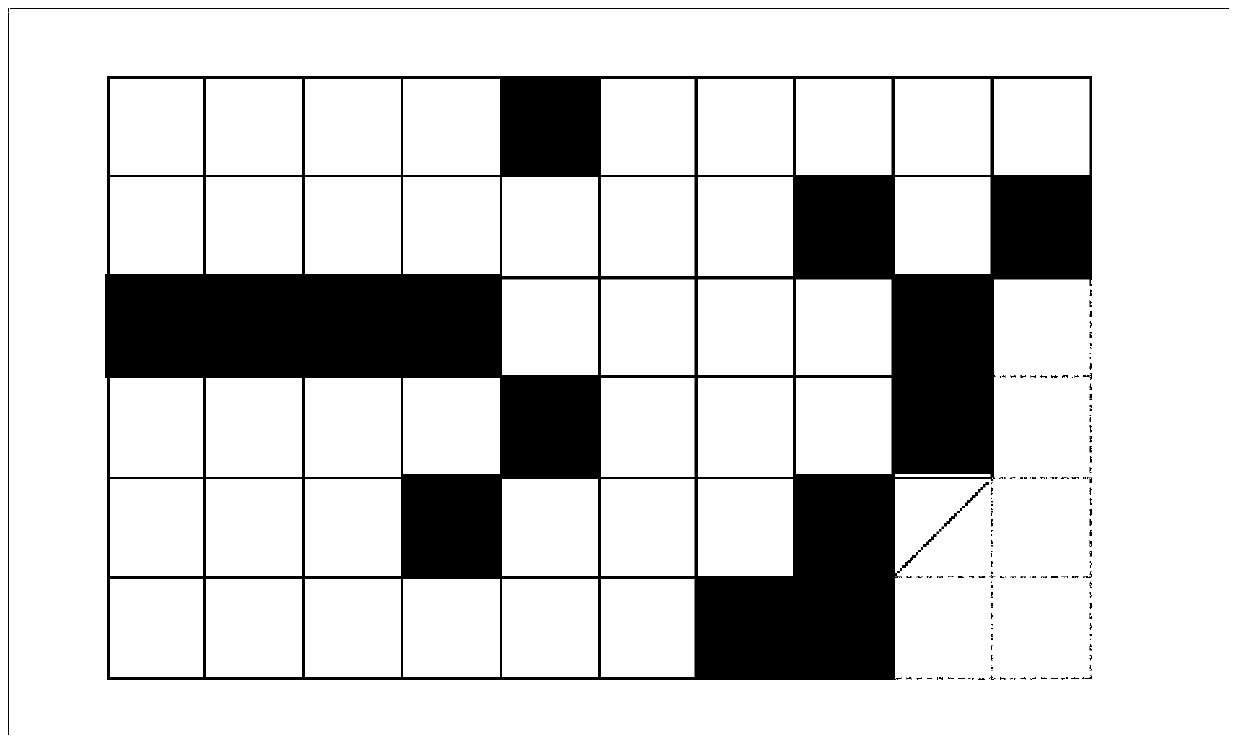
[0027] Step 1: The indoor area is regarded as composed of many basic grid elements, the grid elements are square, and the size of the grid elements is u; the smaller the grid elements, the more accurate the distribution map, and the size of the grid elements is greater than or equal to the robot For direction error, the grid unit size can be set to 5c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More