

Multi-robot task allocation method based on multi-objective optimization
A multi-objective optimization and multi-robot technology, applied in the field of multi-robot task assignment based on multi-objective optimization, can solve problems such as the difficulty of taking into account both time consumption and energy consumption, and increased energy consumption costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0073] In this embodiment, the cooperation between fire-fighting robots in the rescue system under fixed weight is taken as an example to describe the following.
[0074] In this embodiment, RoboCup Rescue Simulation System V0.50 (RoboCupRescueSimulationSystem, RCRSSV0.50) is selected as the simulation experiment platform, and the program code of the GDUT_Tiji team of Guangdong University of Technology in the RoboCup Rescue Simulation Group of the RoboCup2010 China Open is used as the basic framework. The task allocation strategy adopts the multi-robot task allocation method based on multi-objective optimization proposed by the present invention respectively. In this embodiment, the kMC-RCRSTD method is used to decompose the total system tasks, and the following assumptions are made for the subsequent fire-fighting task assignment operations:
[0075] (1) If the work task requires, each fire-fighting robot can move from its initial position along a straight line to any sub-fir...
Embodiment 2
[0098] In this embodiment, the cooperation between fire-fighting robots in the rescue system under fixed weights and setting ω 1 =0.75, ω 2 =0.25 as an example to explain the following.
[0099] Usually, in the robot rescue simulation system, the performance of the fire-fighting robot to complete the task can be evaluated by formula (4). Among them, P represents the number of surviving citizen Agents, S represents the sum of life values of surviving citizen Agents, and S int Represents the sum of the health values of all citizen Agents at the beginning, B represents the total area of buildings that have not been burned (remaining buildings), B int Represents the total area of the building at the beginning.
[0100] V = ( P + S S int ) × B B ...
Embodiment 3
[0114] In this embodiment, the cooperation between fire-fighting robots in the rescue system under variable weights is taken as an example to describe the following.
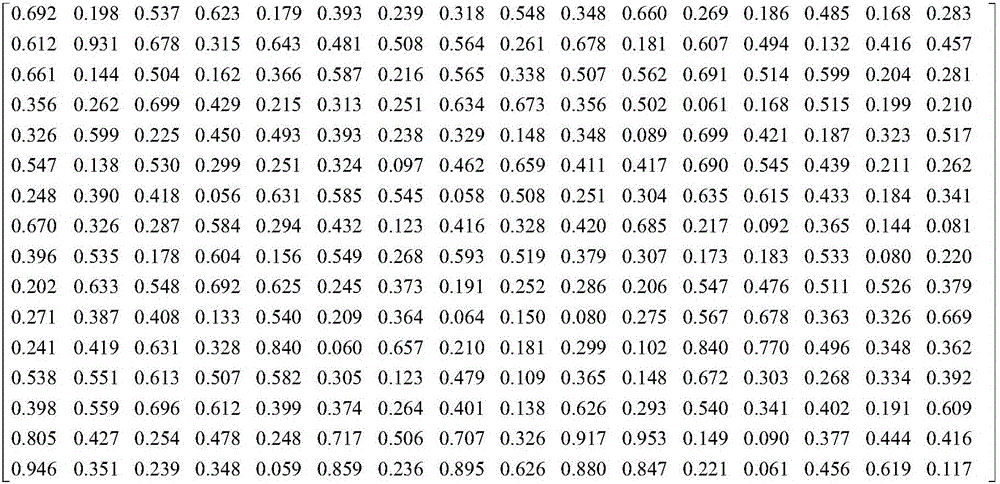
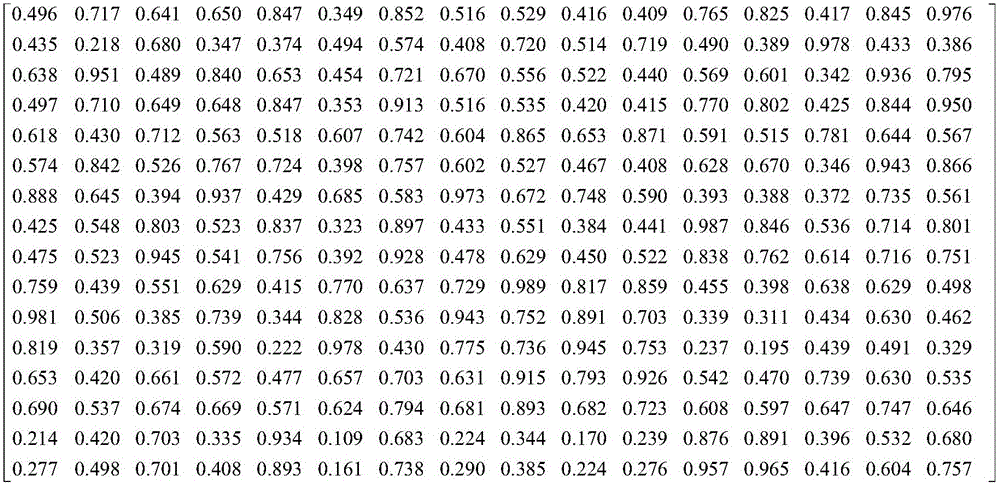
[0115] In this embodiment, under the premise of obtaining the same robot time utility value matrix U and robot energy utility value matrix V as in Embodiment 1, a multi-objective optimization-based multi-robot task assignment method (MOO-MRTA method) is further used to adjust variable weights The following multi-robot task allocation scheme is solved, and the optimization of the task allocation scheme also uses the improved particle swarm optimization algorithm (MPSO). In this example, ω 1 , ω 2 The change step size of these two utility weights is set to 0.02, that is, ω 1 Decrease from 1 to 0 in steps, ω 2 Increment from 0 to 1 synchronously in steps.
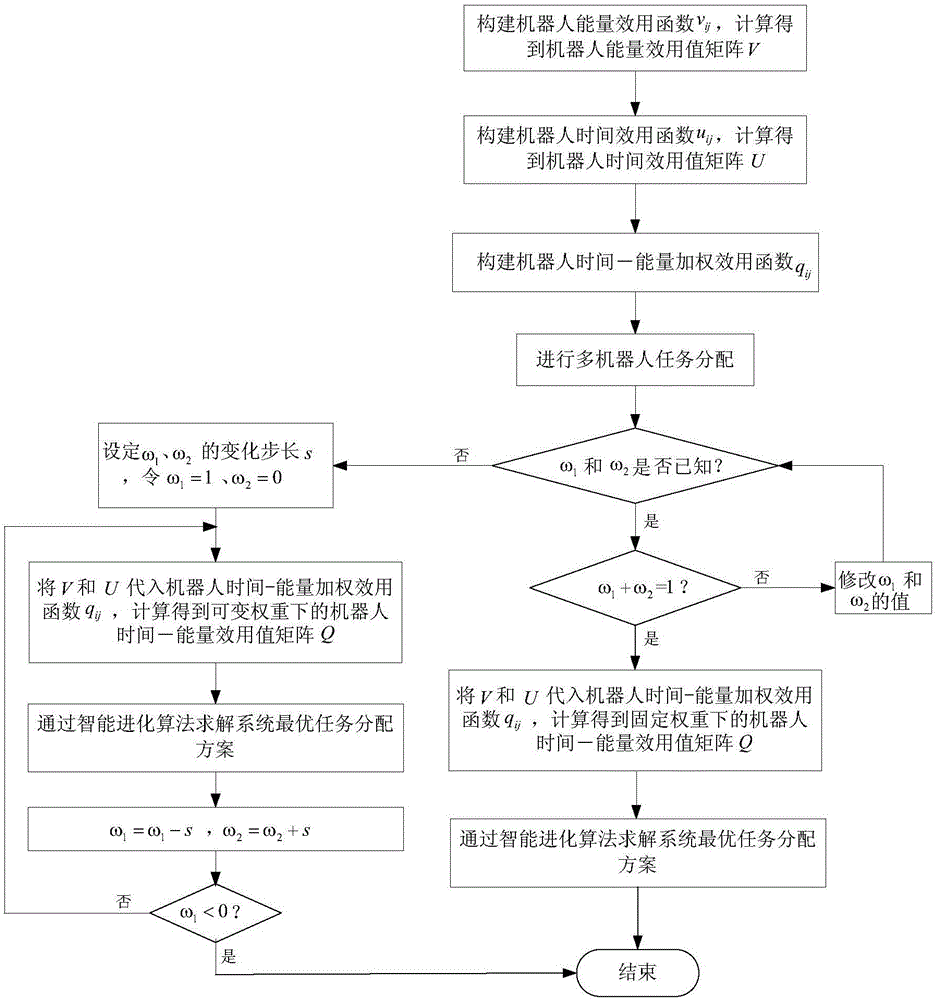
[0116] Such as figure 1 As shown, the multi-robot task assignment method based on multi-objective optimization in the present invention is to use weighted ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More