

Walking robot having landing buffer function
A walking robot and robot technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of walking robots without a landing buffer function, and achieve the effect of autonomous attitude adjustment and positioning, protection of safety, and strong bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further introduced below in conjunction with the accompanying drawings.
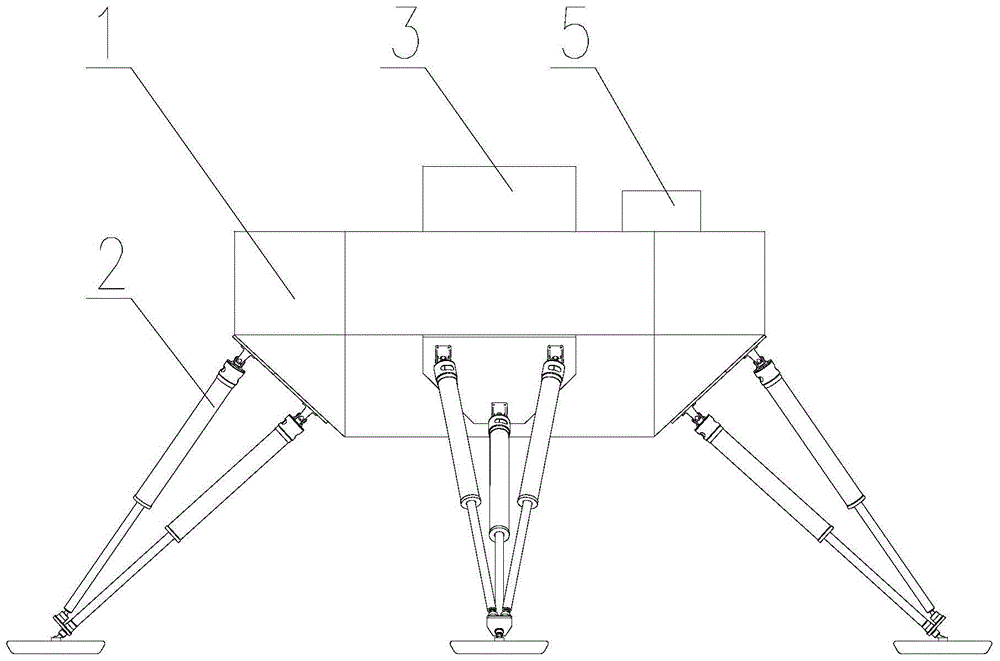
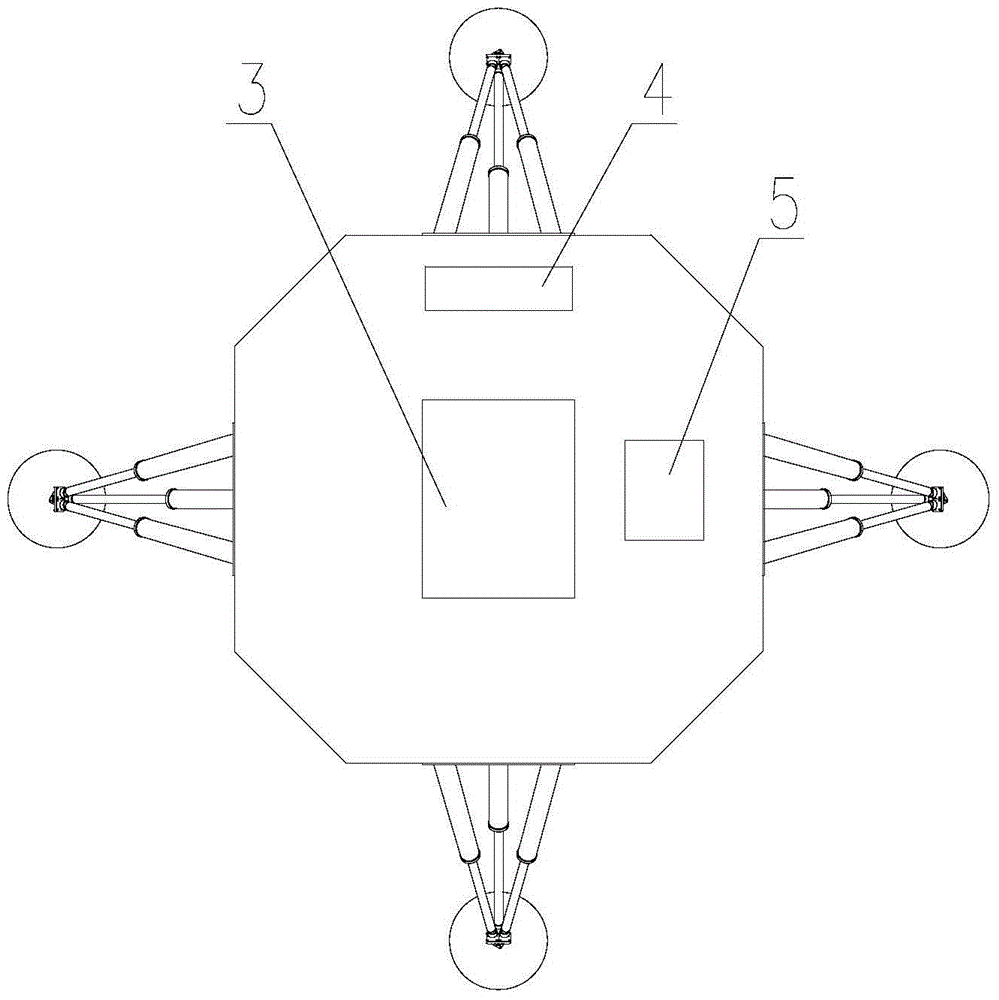
[0031] Such as figure 1 , 2 As shown, a walking robot with a landing buffer function includes a landing platform 1 , multiple sets of buffer walking mechanisms 2 arranged around the landing platform 1 , a parachute bag 3 and a controller 4 . The buffer running mechanism 2 can be, for example, four sets, which are arranged symmetrically on the inclined side below the landing platform 1 .
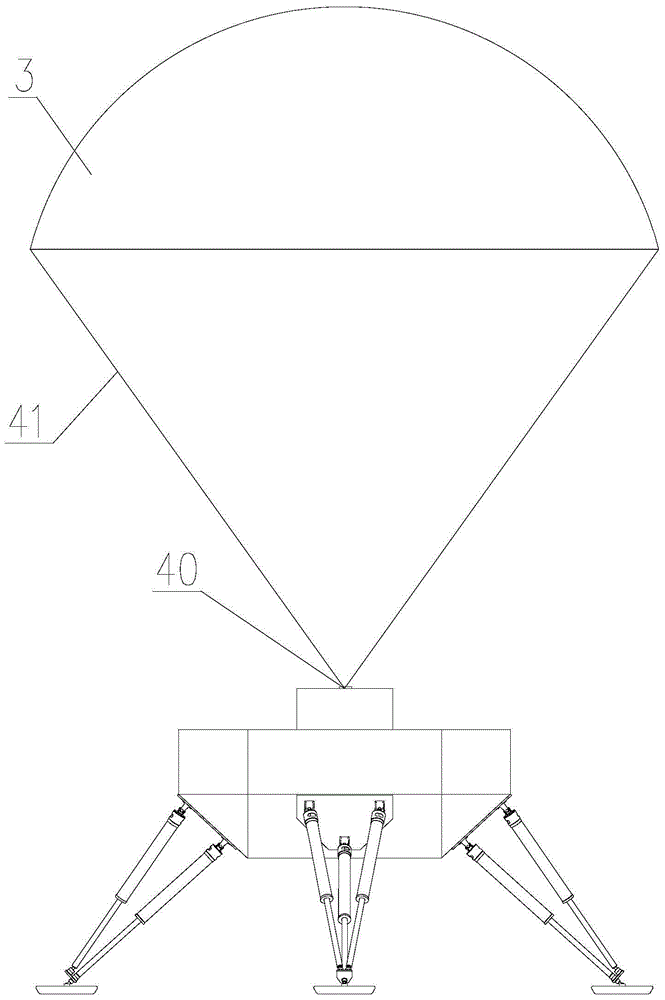
[0032] Such as image 3 As shown, a parachute cutter 40 is set on the landing platform 1, and the parachute 41 is connected to the parachute cutter 40; the parachute bag 3 is installed on the landing platform 1 through the parachute 41. When the robot is dropped in the air, the parachute bag 3 is opened before the robot lands to reduce the speed when it lands, and after the robot lands, the parachute cutter 40 cuts off the parachute. For occasions that do not require airdrops, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More