

A humanoid knee joint with adjustable flexibility
A knee joint and flexible technology, applied in the field of humanoid robots, can solve problems such as lack of flexibility and inability to buffer knee joint impact, and achieve the effect of buffering impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
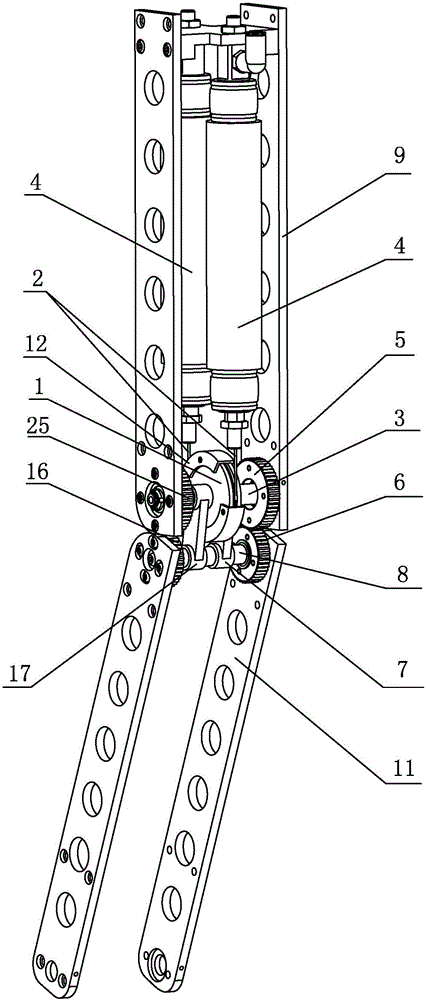
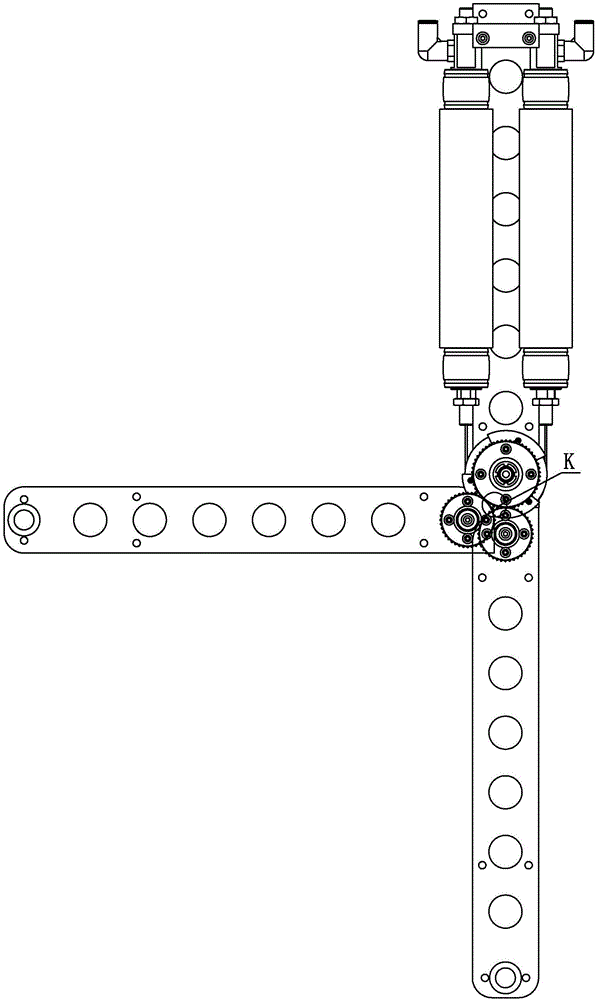
[0011] Specific implementation mode one: combine figure 1 Explain, a humanoid knee joint with adjustable flexibility in this embodiment includes a driving mechanism and a transmission mechanism; the driving mechanism includes a transmission wheel 1, a metal rope 2, a first rotating shaft 3 and two pneumatic artificial muscles 4; The mechanism includes a sun gear 5, a planetary gear 6, a tie rod 7 and a second rotating shaft 8;
[0012] The two pneumatic artificial muscles 4 are set in an antagonistic arrangement, and the upper ends of the two pneumatic artificial muscles 4 are connected to the thigh 9;
[0013] A central gear 5 is fixedly installed on the thigh 9, and the first rotating shaft 3 is mounted on a central gear 5 through bearing rotation;
[0014] A planetary gear 6 is fixed on the shank 11, the second rotating shaft 8 is mounted on a planetary gear 6 through bearing rotation, a central gear 5 meshes with a planetary gear 6, and the first rotating shaft 3 is conne...
specific Embodiment approach 2
[0016] Specific implementation mode two: combination figure 1 Note that the metal rope 2 of this embodiment is a steel wire rope. With such setting, the structure is strong and the operation is stable and reliable. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0017] Specific implementation mode three: combination figure 1 Explain that a humanoid knee joint with adjustable flexibility described in this embodiment also includes another sun gear 25 and another planetary gear 16; 25 is fixed on the thigh 9, one planetary gear 6 and the other planetary gear 16 are arranged facing each other, the other planetary gear 16 is fixed on the lower leg 11, and the first rotating shaft 3 is installed on the other sun gear 25 through bearing rotation, The second rotating shaft 8 is rotatably mounted on another planetary gear 16 through a bearing, and another sun gear 25 meshes with another planetary gear 16 . Such setting can reduce the clearance fit between the sun gear and the planetary gear, maintain balance, and ensure the stable and reliable operation of the knee joint. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More