

Unmanned aerial vehicle tracking shooting method and device
A technology for tracking and shooting drones, which is applied in the field of drones and can solve problems such as manual adjustment of the gimbal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
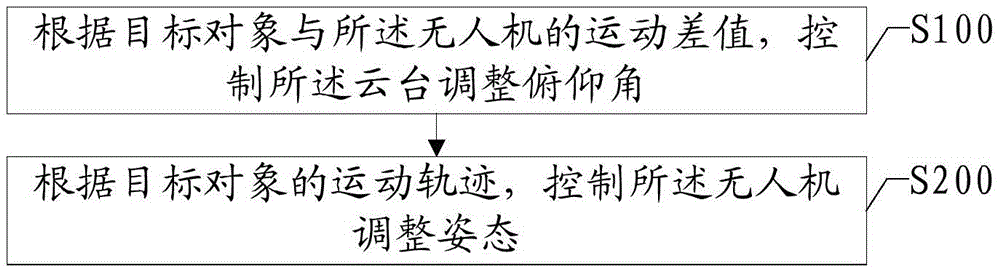
[0055] refer to figure 1 , is the first embodiment of the method for UAV tracking and shooting of the present invention, and the method for UAV tracking and shooting includes:
[0056] Step S100, controlling the gimbal to adjust the pitch angle according to the motion difference between the target object and the drone;
[0057] When the user turns on the tracking shooting function, the flight control system controls the drone to track and shoot the target object. One possible way is to preset the horizontal distance and height between the target object and the drone before starting the tracking shooting. difference, after the flight control system starts tracking and shooting, it controls the user-preset horizontal distance and height difference between the UAV and the target object, and calculates the UAV according to the horizontal distance and height difference through the arctangent function. The pitch angle of the cloud platform carried, the pitch angle of the cloud plat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More