

Surround shooting method and device, and unmanned aerial vehicle
A surround shooting and drone technology, applied in the field of drones, can solve the problems of difficult shooting of aircraft, complicated operation, weak sense of distance, etc., and achieve the effect of saving user time and simple operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
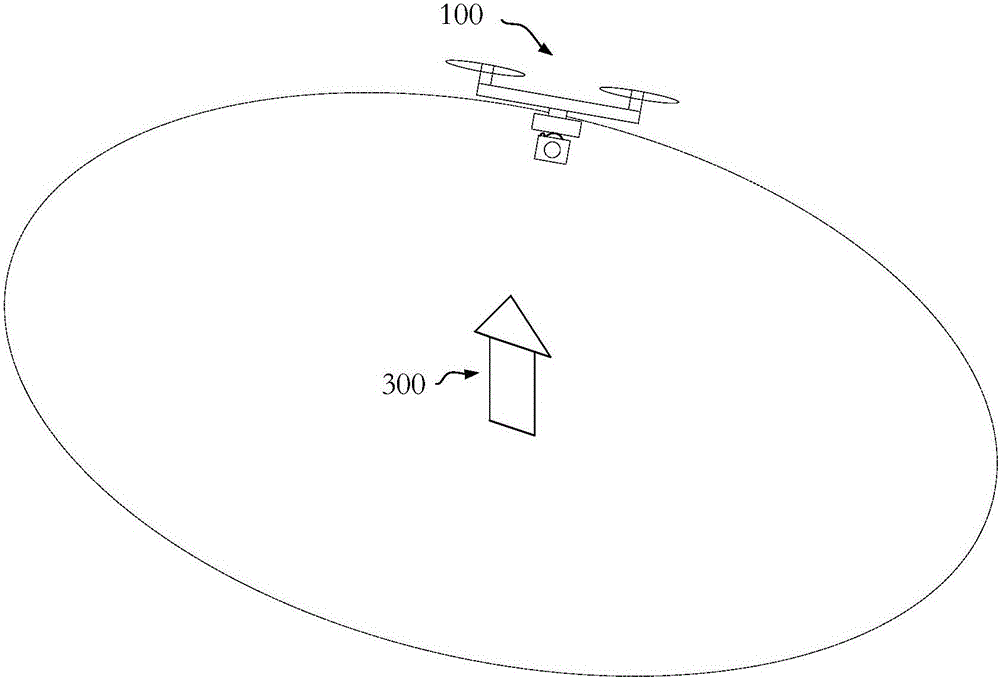
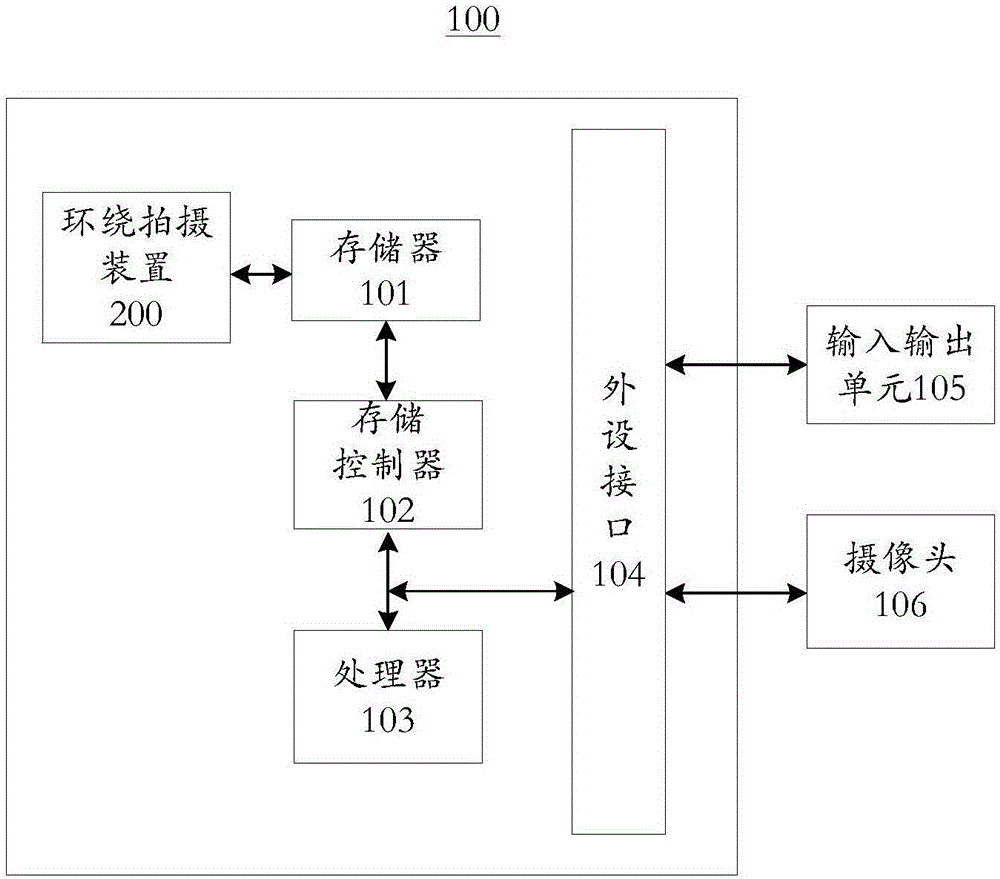
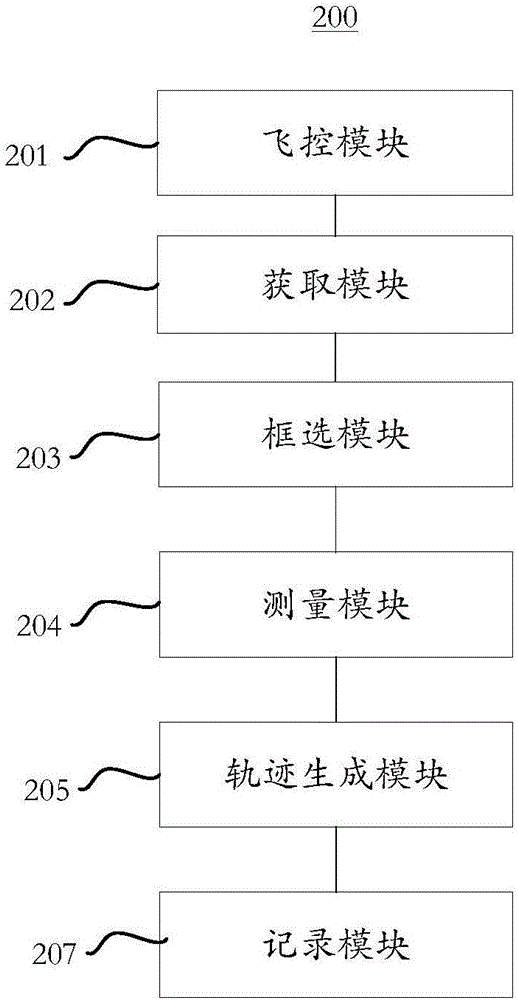
[0028] Please refer to image 3 , is a block diagram of the surrounding shooting device 200 provided in this embodiment, and the surrounding shooting device 200 is applied to the UAV 100 . In this embodiment, the surround shooting device 200 is applied in the first shooting mode. It should be mentioned that in the first shooting mode, the target object 300 is in a static state. The surrounding shooting device 200 includes: an acquisition module 201 , a frame selection module 202 , a flight control module 203 , a calculation module 204 and a trajectory generation module 205 .
[0029] The obtaining module 201 is configured to obtain a preview image captured by the camera 106 at the first position.
[0030] Since the camera 106 captures images in real time, the user can control the drone 100 to fly to any position. Of course, the acquisition module 201 can acquire the image captured by the camera 106 when the drone 100 is at the first position, and use it as a preview image. I...
no. 2 example
[0061] Please refer to Figure 5 , is a block diagram of the surround camera device 200 provided in this embodiment. In this embodiment, the surround shooting device 200 is applied in the second shooting mode. It should be mentioned that in the second shooting mode, the target object 300 is in a moving state. The difference between the surround shooting device 200 of this embodiment and the first embodiment is that the surround shooting device 200 further includes: a timing module 206 and a comparison module 208 .
[0062] The timing module 206 is configured to start timing when the UAV 100 is flying along the orbiting track, and the time when the UAV 100 starts flying along the orbiting track is the initial moment.
[0063] The calculation module 204 is also used to calculate the distance between the UAV 100 and the target object 300 at a preset time point.
[0064] The preset time point can start from the initial moment counted by the timing module 206, and a preset time p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More