

Control method and device based on depth sensing equipment
A technology of depth sensing and control method, which is applied in the field of interactive control, can solve problems such as speed difference, proficiency difference, and inability to realize motion trajectory control requirements, and achieve the effect of easy engineering application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, and do not limit the protection scope of the present invention.
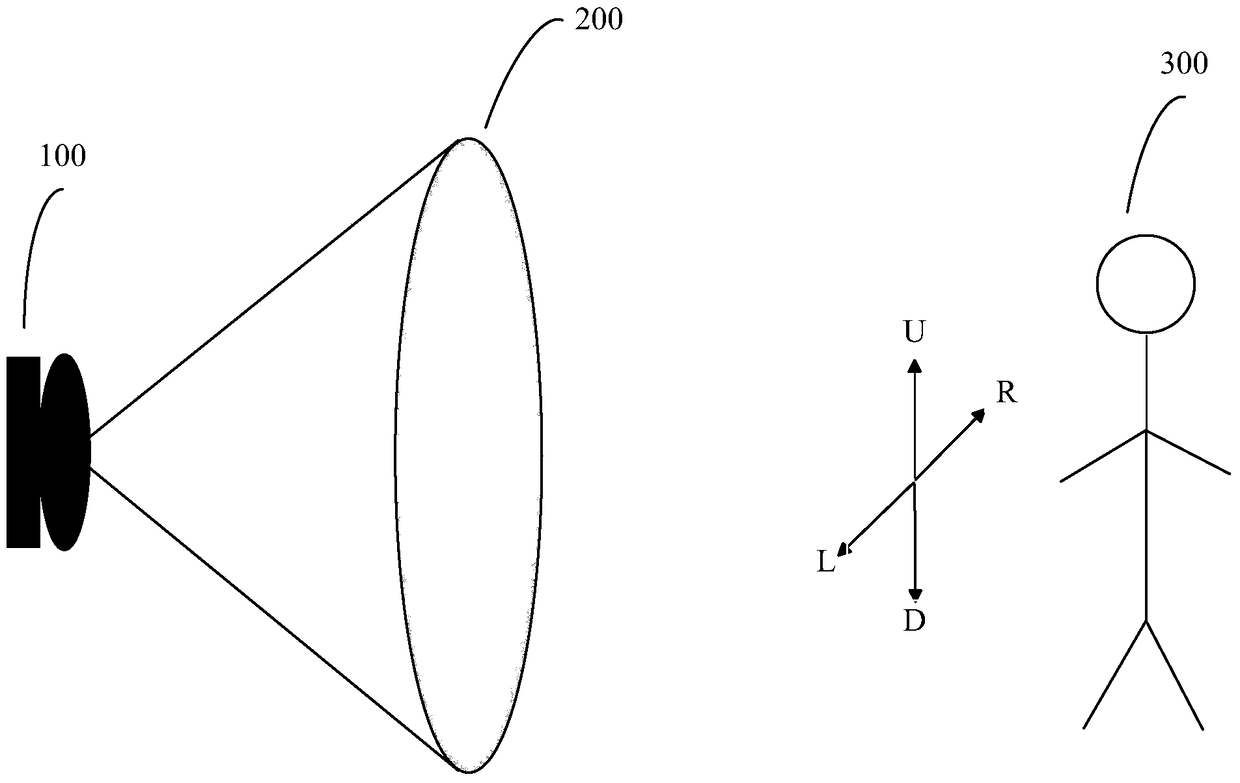
[0024] figure 1 A schematic diagram of an application environment of the solution of the present invention in an embodiment is shown in . Such as figure 1 As shown, the inventive solution involves operation based on depth sensors. The user 300 makes relevant gestures within the effective control range 200 of the depth sensor 100, the depth sensor 100 can capture the depth image within the effective control range, and determine the gesture area from the captured depth image to realize the gesture area tracking identification. The solution of the embodiment of the pres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More