

Modular Rope-Driven Decoupled Robotic Arm Joint and Its Working Method
A rope-driven, modular technology, applied in the field of robotics, can solve problems such as kinematic coupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The accompanying drawings disclose non-restrictive structural schematic diagrams of preferred implementations involved in the present invention, and the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
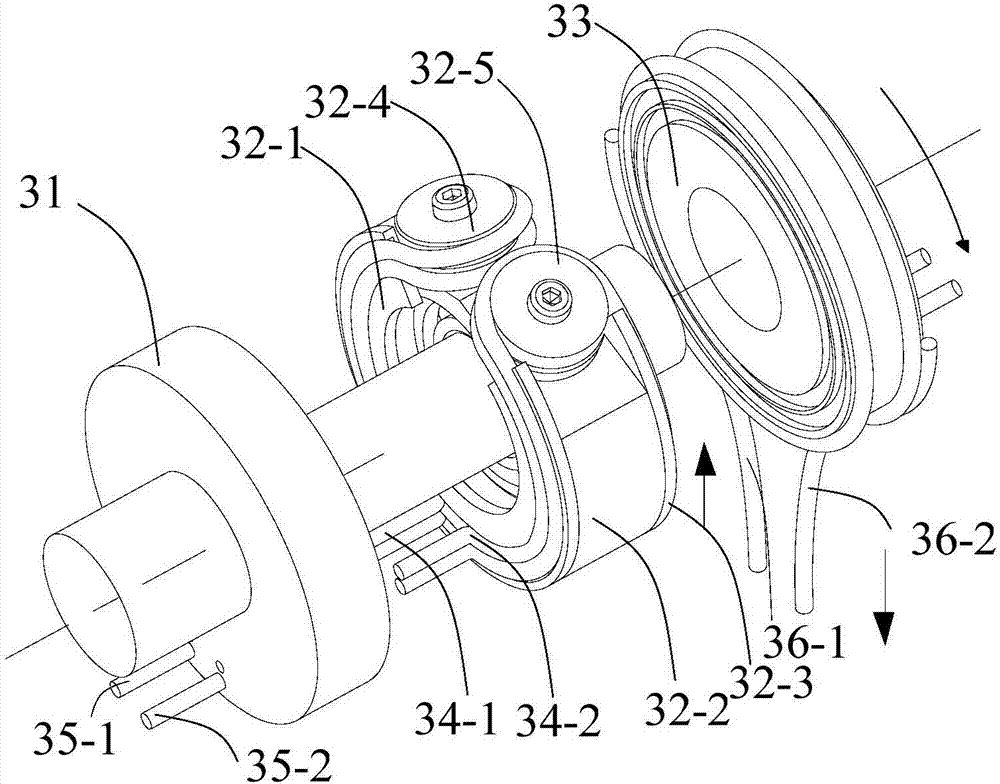
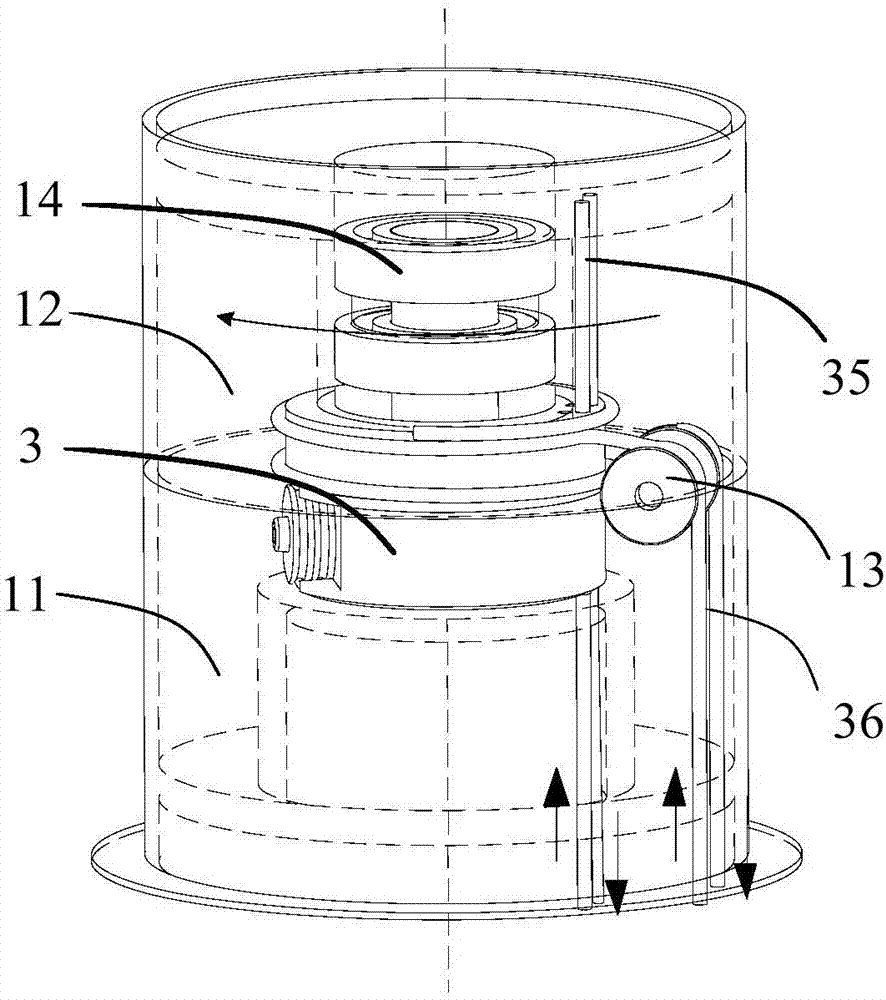
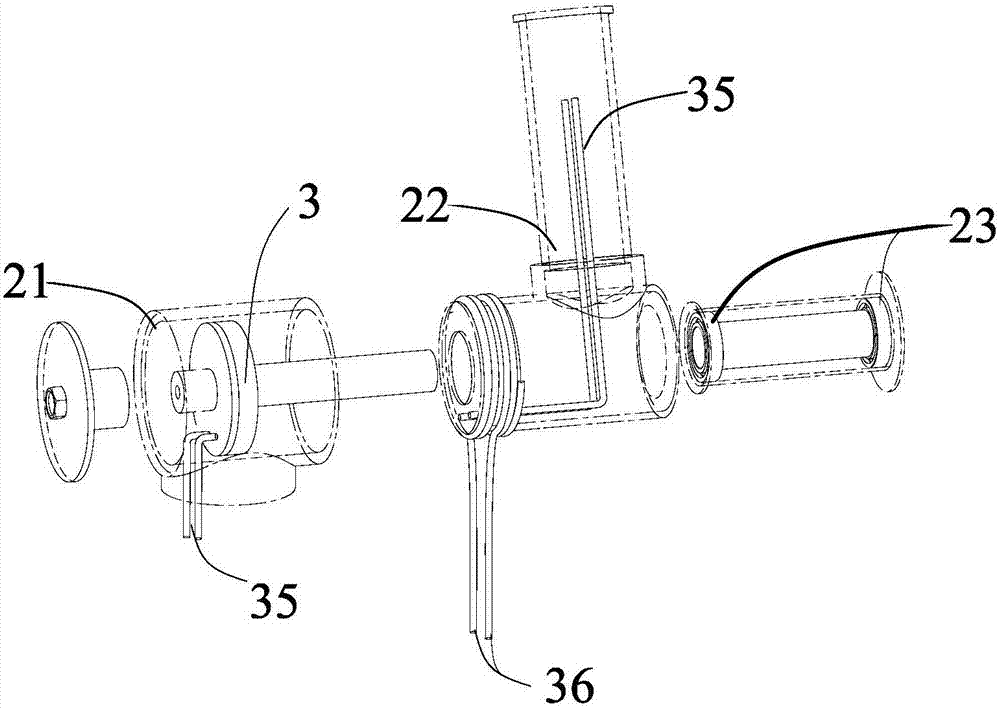
[0058] see figure 1 , 4 As shown in , 5, a mechanism for passive decoupling of the driving rope movement of the rope-driven serial manipulator is provided. The rope motion decoupling mechanism 3 includes a fixed wheel 31, a follower wheel 32, and a driving wheel 33 from front to back; wherein the fixed wheel 31 includes a fixed wheel disc and a fixed wheel axle, and the fixed wheel disc and the fixed wheel axle are fixedly connected to each other. It is fixed and cannot rotate; the follower wheel 32 is installed on the fixed wheel axle, it is driven by the decoupling rope, and the axial displacement is limited; the rope motion decoupling mechanism 3 also includes a left decoupling rope 34-1, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More