

Mechanical claw differential rotation opening and closing mechanism for underwater robot
A technology of underwater robots and opening and closing mechanisms, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of increased probability of water ingress in actuators, achieve simple structure, high load-to-weight ratio, and reduce installation and manufacturing costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention. In the following paragraphs the invention is described more specifically by way of example with reference to the accompanying drawings. Advantages and features of the present invention will be apparent from the following description and claims. It should be noted that the drawings are all in very simplified form and use inaccurate scales, which are only used for convenience and clarity to assist in describing the purpose of the embodiments of the present invention.
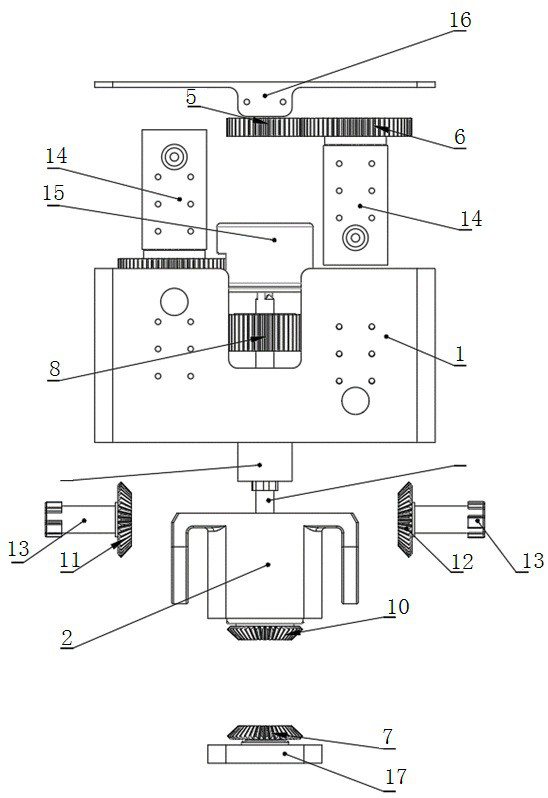
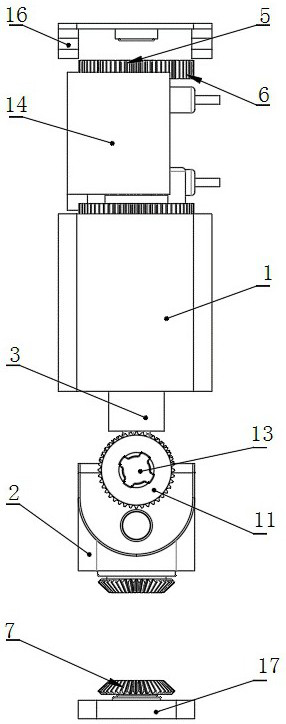
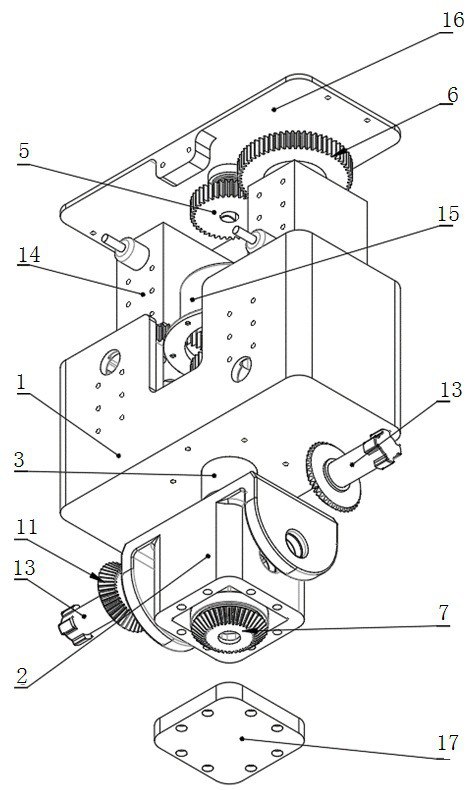
[0034] like Figure 1-10 As shown, the present invention provides a mechanical claw differential rotation opening and closing mechanism for underwater robots, including a main housing 1 and a differential gear box 2 installed below the main housing, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More