

Ontract replaceable joint of large space service robot
A technology for service robots and joints, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve the problems of small load-to-weight ratio, large joint quality, and poor control accuracy of robots, and achieve light weight, improve control accuracy, and improve position accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
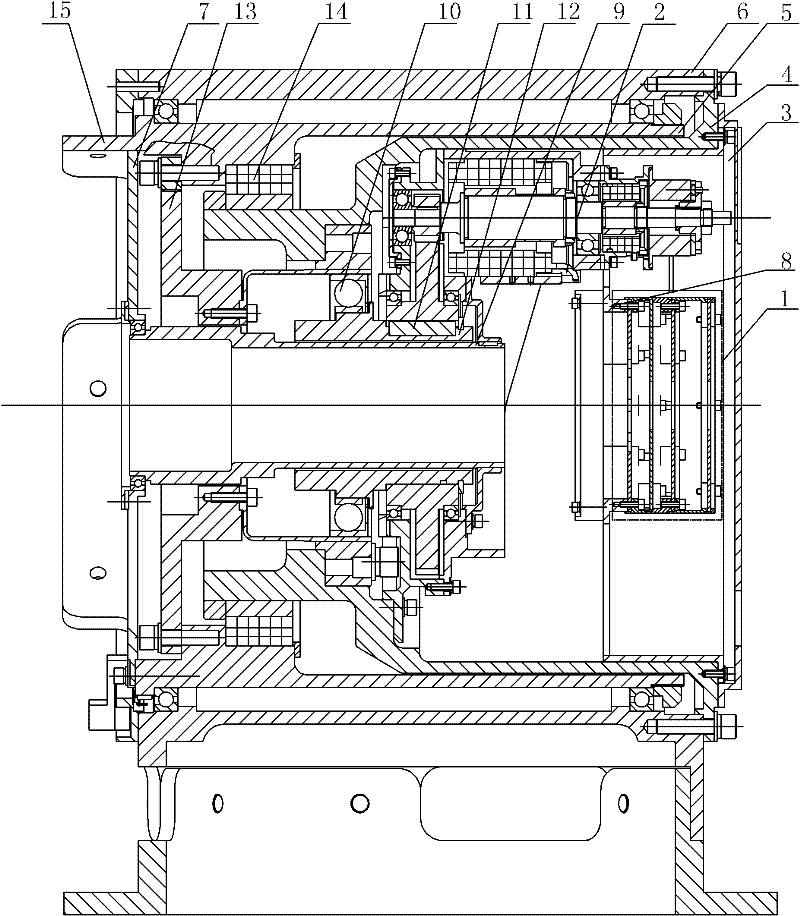
[0009] Specific implementation mode one: combine Figure 1-Figure 3 Describe this embodiment. The joint of this embodiment includes an electrical device 1, a drive device 2, a joint front cover 3, a joint inner shell 4, a joint output shell 5, a joint shell 6, a joint rear cover 7, a circuit board connector 8, a cylinder Shaped hollow shell 9, harmonic reducer 10, key 11, hollow shaft 12, torque sensor 13 and axial flange 15, the joint front cover 3 is installed on the joint inner shell 4, and the two are detachably connected, the joint inside The tail of the shell 4 is processed with an axial flange 15, the joint inner shell 4 is set in the joint shell 6, and the two are detachably connected, the joint output shell 5 is set between the joint inner shell 4 and the joint shell 6, and the joint output The shell 5 is rotatably connected to the joint shell 6, the joint back cover 7 is installed in the joint output shell 5, and the two are detachably connected, and the inner hole o...
specific Embodiment approach 2
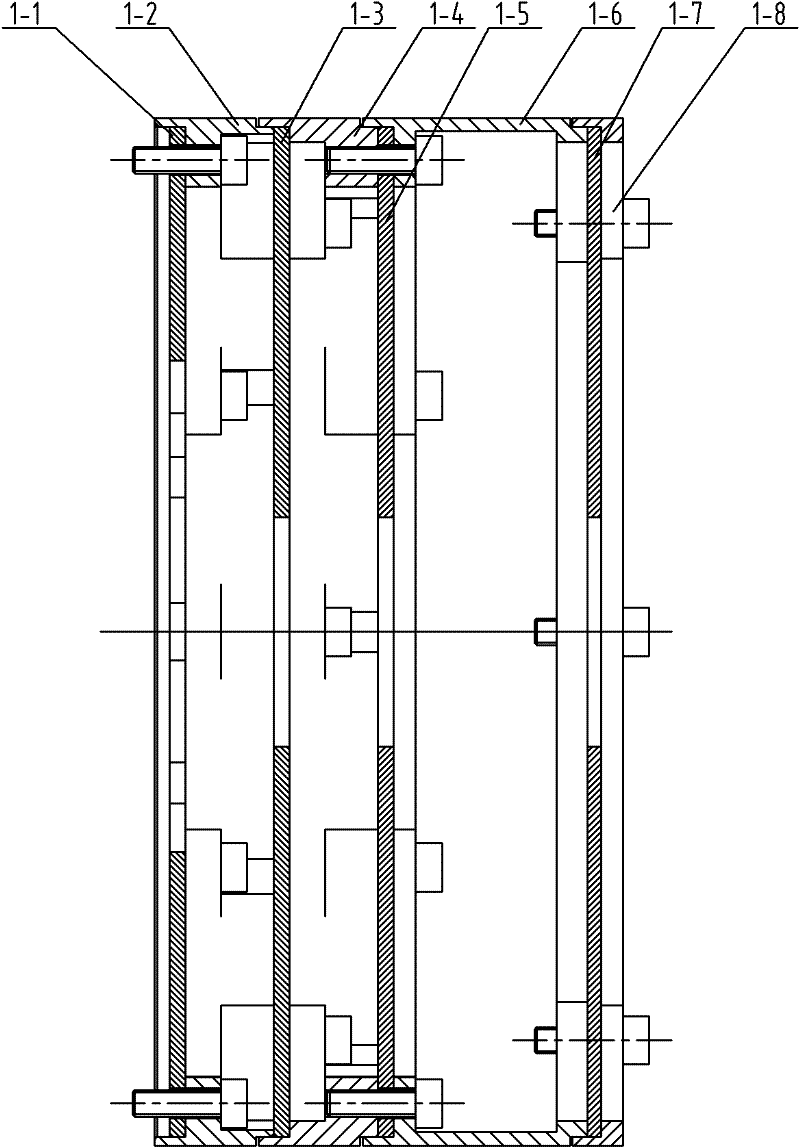
[0011] Specific implementation mode two: combination image 3 Describe this embodiment, the electrical device 1 of this embodiment consists of a joint driving circuit board 1-1, a first bracket 1-2, a joint control circuit board 1-3, a second bracket 1-4, and a joint power supply circuit board 1-5 The third bracket 1-6, the joint interface circuit board 1-7 and the joint interface circuit board pressure ring 1-8 are composed, the joint drive circuit board 1-1 is fixed on the circuit board connector 8 through the first bracket 1-2, and the joint The control circuit board 1-3 is fixed on the joint control circuit board support 1-2 through the second support 1-4, and the joint power circuit board 1-5 is fixed on the joint power circuit board support 1-4 through the third support 1-6 , the joint interface circuit board 1-7 is fixed on the joint interface circuit board bracket 1-6 through the joint interface circuit board pressing ring 1-8, the joint driving circuit board 1-1, the ...
specific Embodiment approach 3
[0012] Specific implementation mode three: combination figure 1 Describe this embodiment, the joint of this embodiment further includes a second rotary transformer 14, the second rotary transformer 14 is installed in the joint casing 6, and the two are fixedly connected. The joint resolver 14 is used to obtain high-precision joint position information to ensure joint control precision. Other components and connections are the same as those in the first embodiment.
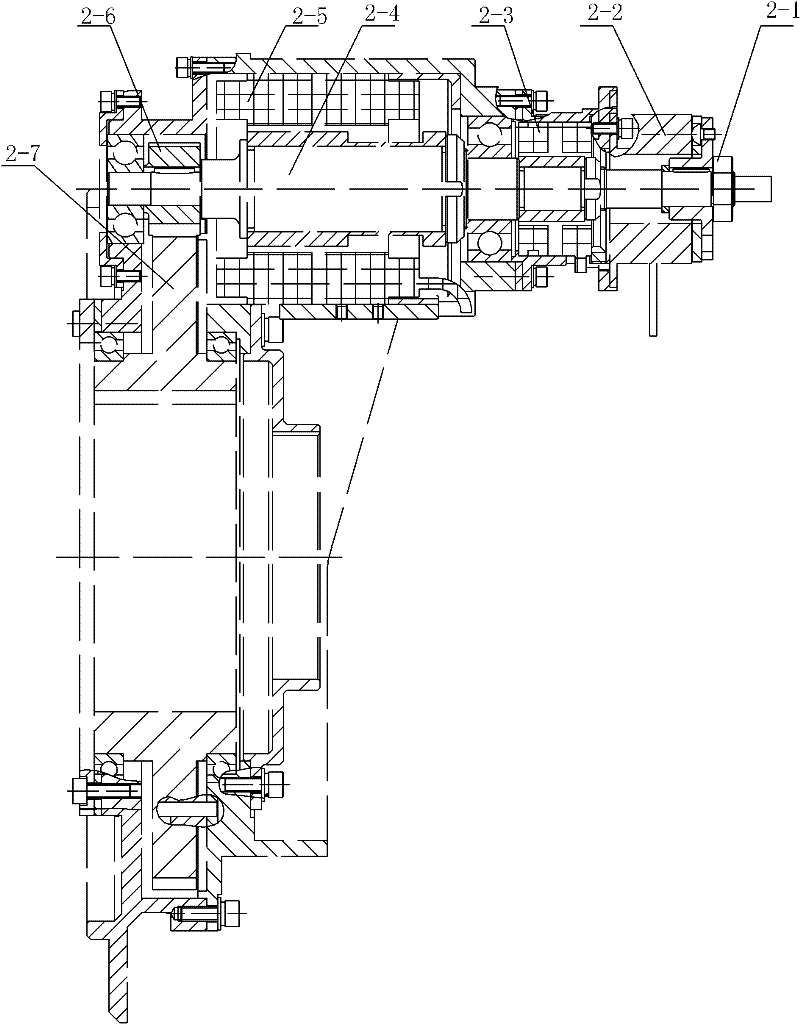
[0013] Working principle: The motor 2-5 is used as the power device of the entire joint, which converts electrical energy into mechanical energy and provides the joint with the required output power. The first rotary transformer 2-3 is used to detect the position of the rotor of the motor, and its existence is a prerequisite for high-precision servo control of the motor. At the same time, the holding brake 2-2 provides braking torque in emergency situations. The power of the joint is transmitted to the motor tra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More