

Method and apparatus for controlling non-linear prediction of helicopter for spinning recovery
A non-linear prediction and control method technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of time delay, excessive transient glide of rotor speed, unfavorable safe and reliable operation of helicopters, etc. Reduce transient glide and overcome the effect of time delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
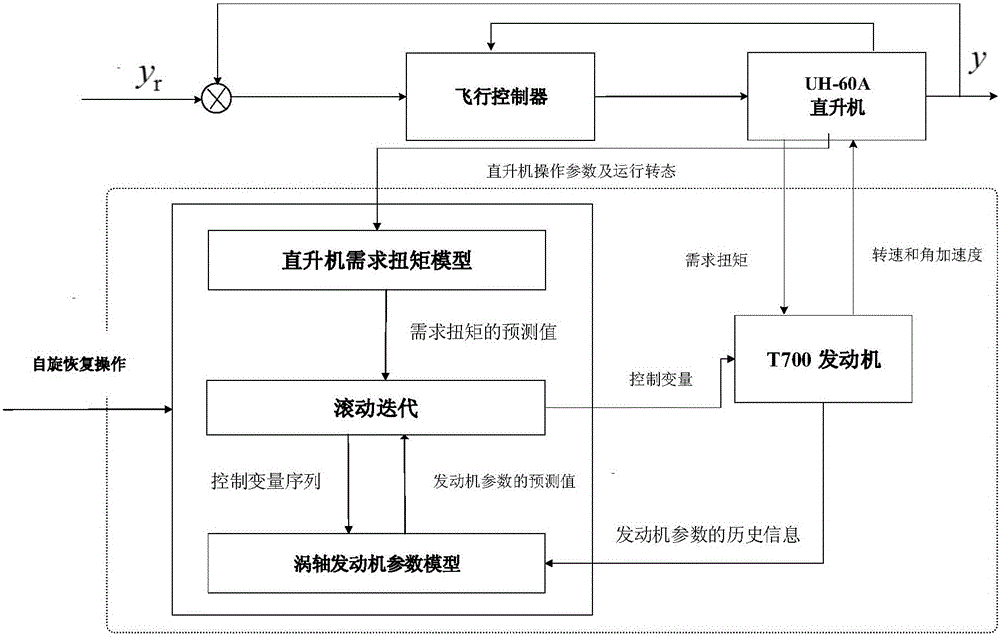
[0035]The present invention aims at the problems of time delay and too large transient glide of the rotor speed in the spin recovery stage of the helicopter in the existing predictive control method, and proposes a new predictive control method, which utilizes the nonlinear model predictive control technology to The goal is to reduce the difference between the torque demanded by the helicopter and the torque support provided by the engine when the clutch is turned on, and considering the stable and safe operating conditions of the engine, the rolling optimization of the helicopter control amount can effectively reduce the time delay and the transient state of the rotor speed slide.
[0036] Specifically, after entering the spin, use the pre-trained helicopter demand torque model to carry out real-time online prediction of the current helicopter demand t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More