

Dual-arm robot teleoperation control system shared by two persons
A teleoperation control and robotics technology, applied in the field of teleoperation, can solve the problems of auxiliary manipulator arm collision and difficult to take into account the auxiliary manipulator arm at the same time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention is described in further detail below in conjunction with accompanying drawing:
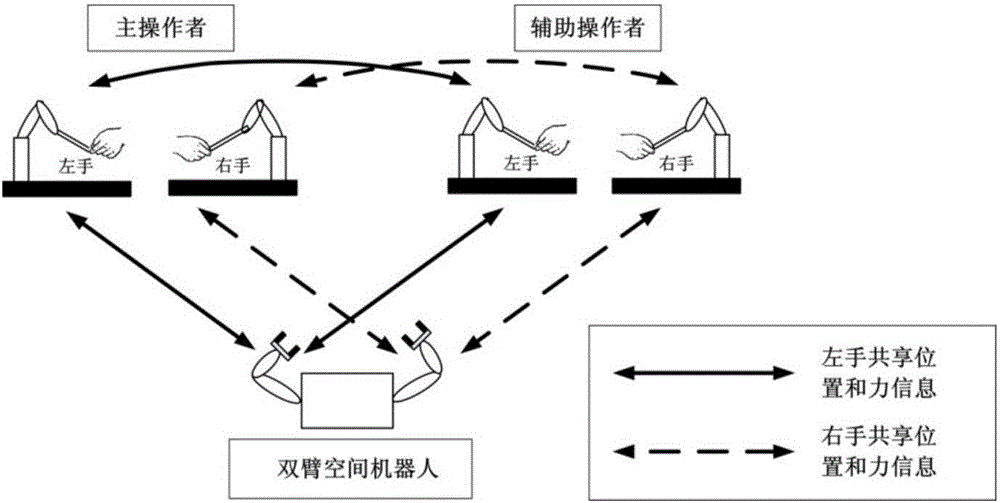
[0049] see Figure 1-Figure 3 , which includes the following five steps:
[0050] 1. Establish a dynamic model of two-handed operation:
[0051] F h 1 l = F h 1 l * - Z h 1 l V h ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More