

Three-dimensional barycenter adjusting device for robot jellyfish
A center-of-gravity adjustment, three-dimensional technology, applied to motor vehicles, underwater ships, transportation and packaging, etc., can solve the problem that the center-of-gravity adjustment structure cannot realize the three-dimensional free adjustment of the center of gravity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
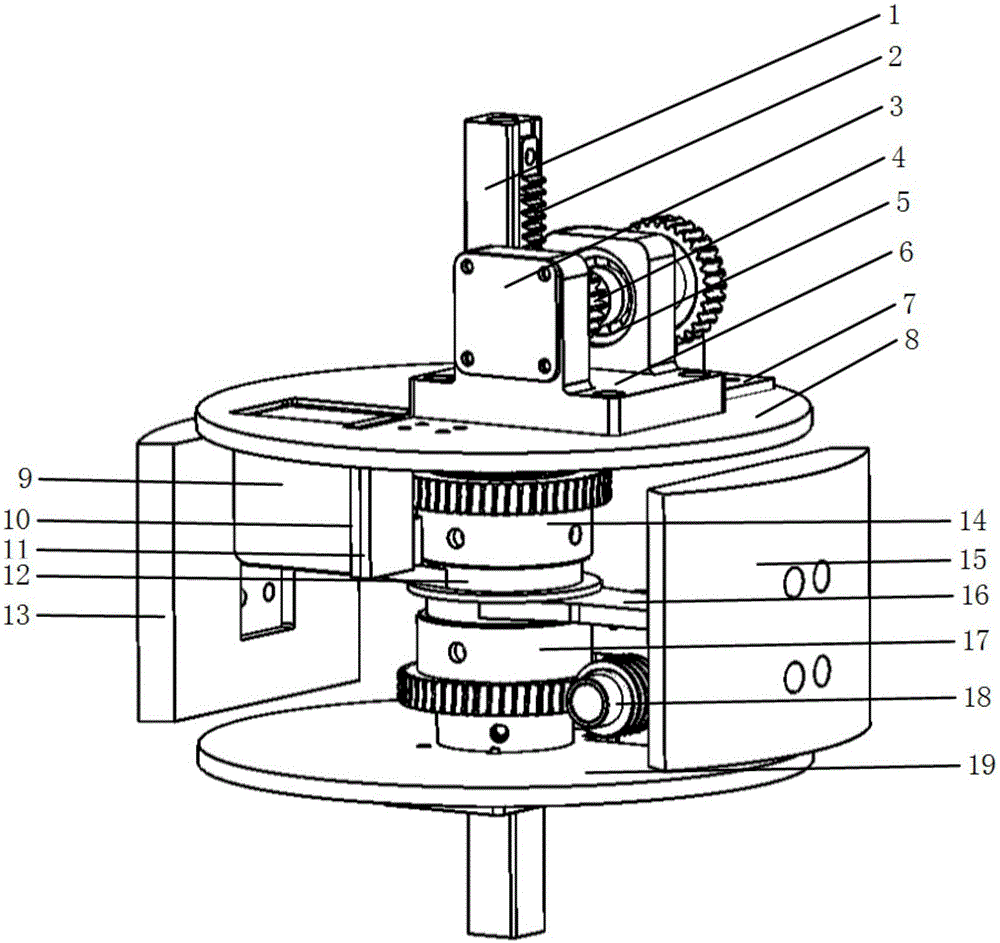
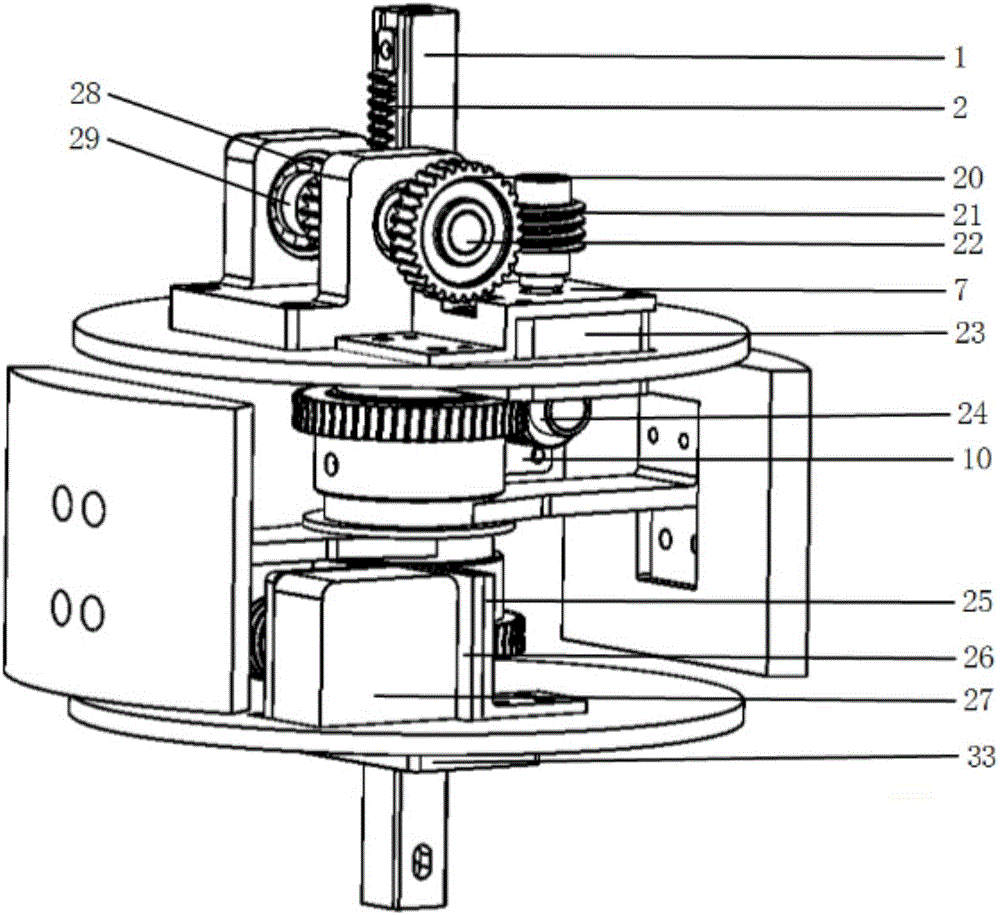
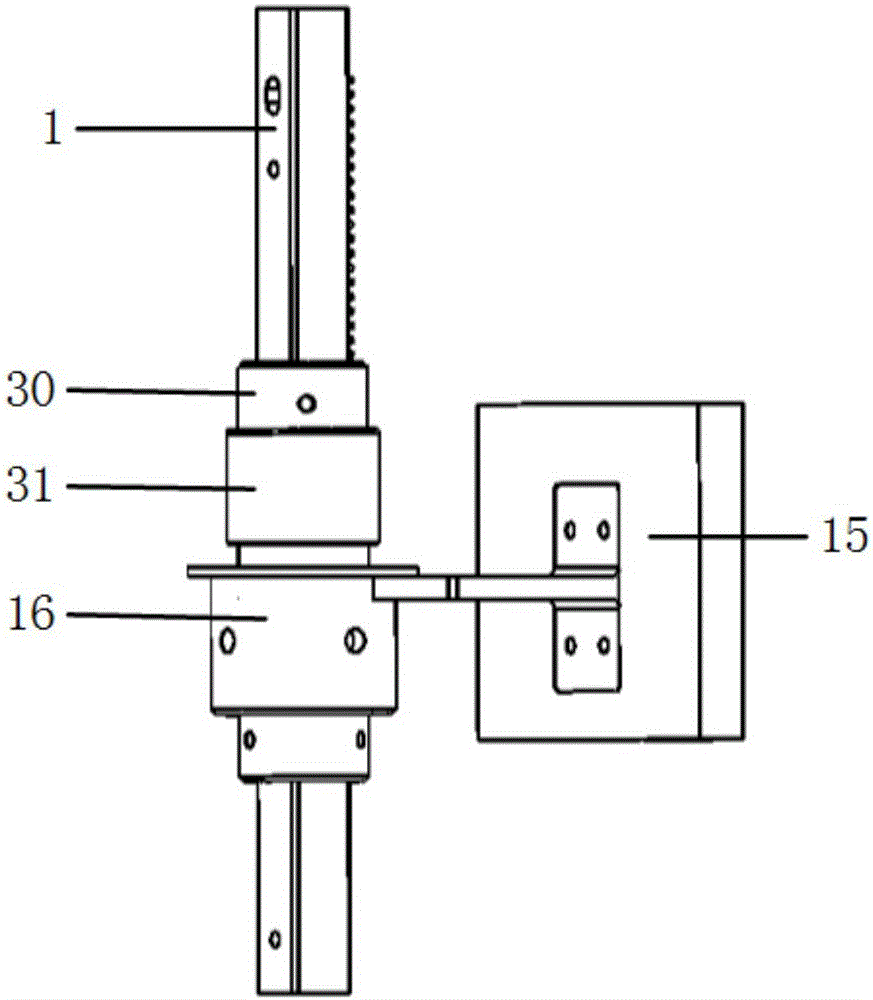
[0018] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention. For example, although the positional relationship between the various elements in the drawings and the size of each element are drawn in a certain scale, this proportional relationship is not static, and those skilled in the art can make adjustments to it according to needs, so as to adapt to specific applications occasion.
[0019] It should be noted that, in the description of the present invention, the terms "center", "upper", "lower", "left", "right", "vertical", "horizontal", "inner", "outer" etc. The terms of the indicated direction or positional relationship are based on the direction or positional relationship shown in the drawings, whi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More