

Driving device and mobile robot
A mobile robot and driving device technology, applied in the directions of manipulator, transportation and packaging, elastic suspension, etc., can solve the problems of uneven load distribution, affecting the movement performance of omnidirectional mobile robots, and difference in driving force, so as to improve the synchronous driving effect. , Buffer vibration and impact, maintain the effect of effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
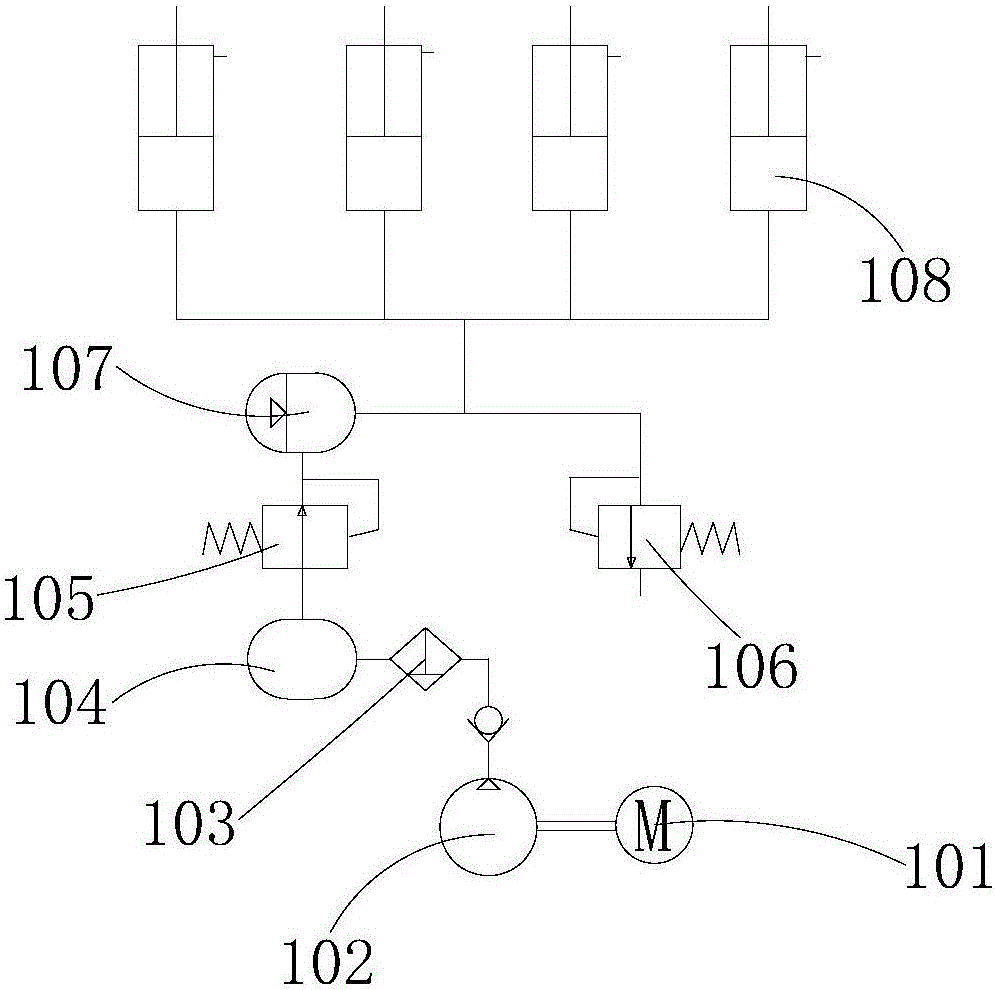
[0049] refer to figure 1 and figure 2 , the present embodiment provides a driving device, including an airbag 107, an air delivery device 110 and a plurality of driving mechanisms, the driving mechanism includes a power mechanism 109 and a cylinder 108, the power mechanism 109 is installed on the output end of the cylinder 108, and the plurality of cylinders 108 The input ends of the airbags are respectively connected with the airbags 107, and the air delivery device 110 communicates with the airbags 107, and the air delivery device 110 is used to control the amount of gas in the airbags 107.
[0050] The driving device provided in this embodiment connects a plurality of driving mechanisms with an air bag 107 at the same time, and the air bag 107 communicates with the cylinder 108. When the power mechanism 109 contacts the ground, under the action of the air bag 107 and the cylinder 108, each power mechanism 109 and The pressure during ground contact is all the same, which i...
Embodiment 2
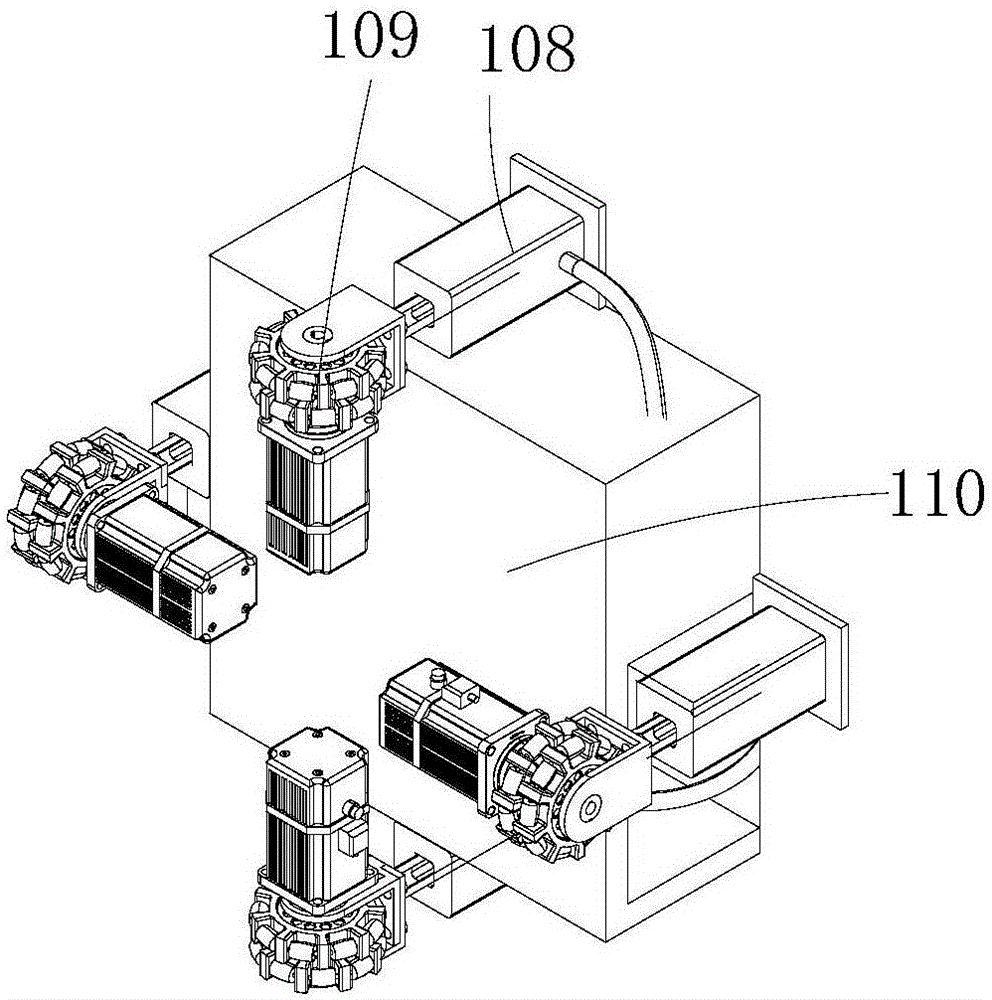
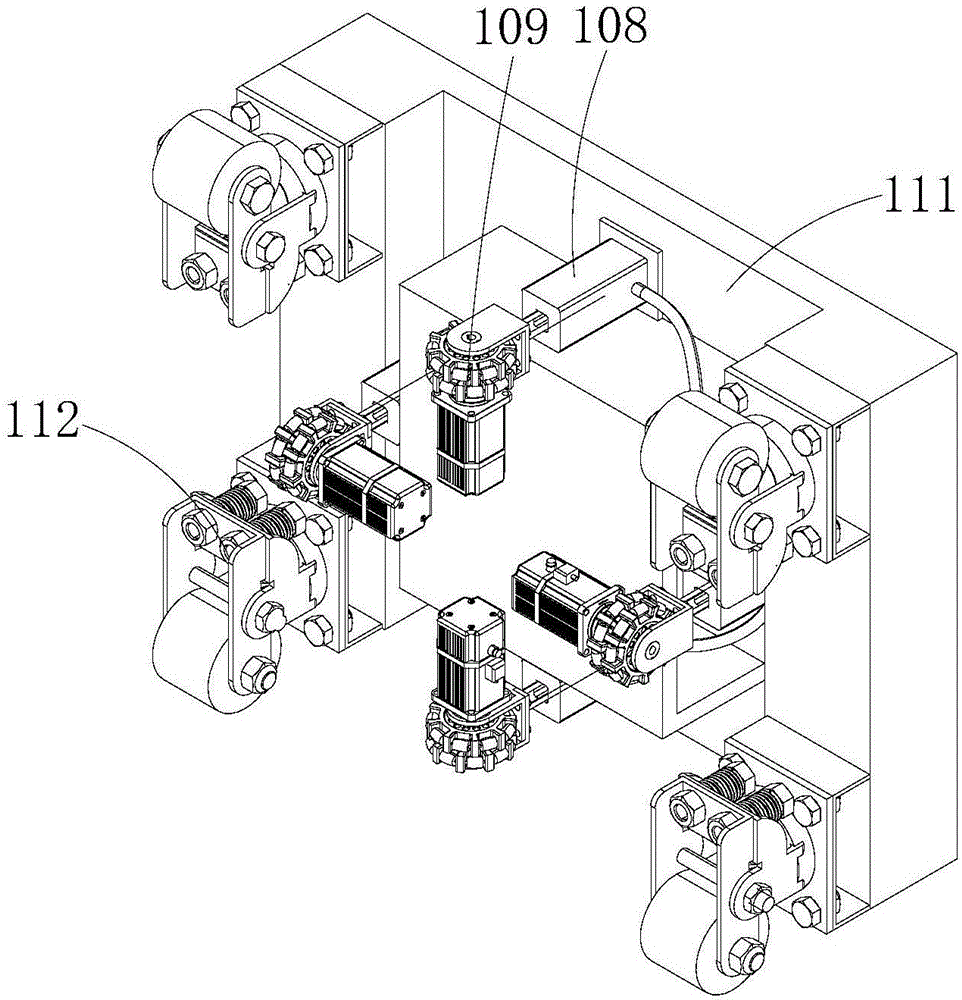
[0059] refer to Figure 3 to Figure 5 , the present embodiment provides a mobile robot, including a robot main body and the above driving device, and the driving device is installed on the bottom of the robot main body.
[0060] The driving device in the mobile robot provided in this embodiment connects multiple driving mechanisms with an air bag 107 at the same time, and the air bag 107 communicates with the cylinder 108. When the power mechanism 109 contacts the ground, under the action of the air bag 107 and the air cylinder 108, each The pressure when the power mechanism 109 is in contact with the ground is all the same, which is convenient to improve the synchronous driving effect of each power mechanism 109. At the same time, the airbag 107 can also effectively buffer the vibration and impact caused by the uneven ground to ensure the stability of the mobile robot body.
[0061] The main body of the robot includes a base 111 and a plurality of auxiliary universal wheels 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More