

A route planning method for a mobile robot
A mobile robot and route planning technology, applied in the field of mobile robots, can solve problems such as inflexibility and achieve the effect of simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
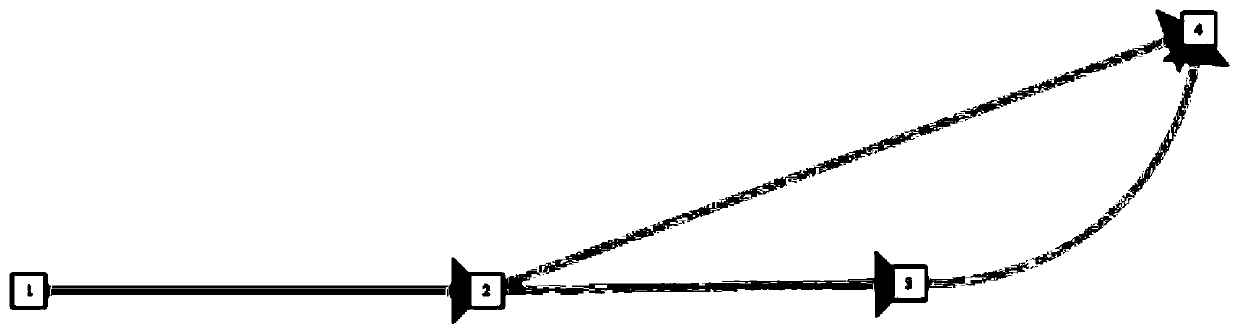
[0022] like Figure 1-5 As shown, the present invention discloses a route planning method for a mobile robot, comprising the following steps:
[0023] Step 1, searching for a feasible route according to the moving target of the robot and the node attributes on the map;
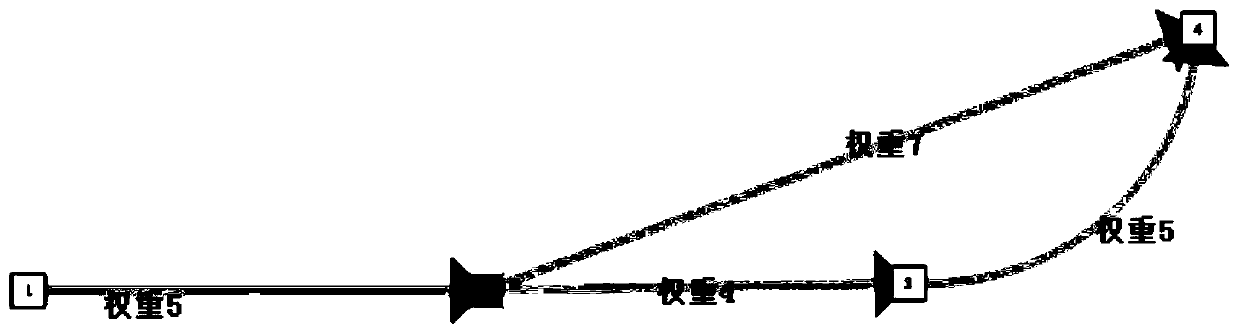
[0024] Step 2, determine the optimal route according to the weight value of the line segment in all feasible routes, the line segment is an arbitrary curve composed of Bezier curves or spline curves of multiple control points;
[0025] Step 3, drive the robot to move along the optimal route and stop at the stop.
[0026] In step 1, the node attributes include rotatable attributes and non-rotatable attributes, and the robot can rotate in situ at the nodes with rotatable attributes, so as to switch line segments and search for feasible routes.
[0027] If the angle b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More