

Stroke calibration method of mobile robot
A technology of mobile robots and calibration methods, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as deviations
Active Publication Date: 2017-02-15
创想智控科技(深圳)有限公司
View PDF5 Cites 21 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0005] However, the above methods are all mathematical methods, which are more accu
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
 Login to View More
Login to View More PUM
 Login to View More
Login to View More Abstract
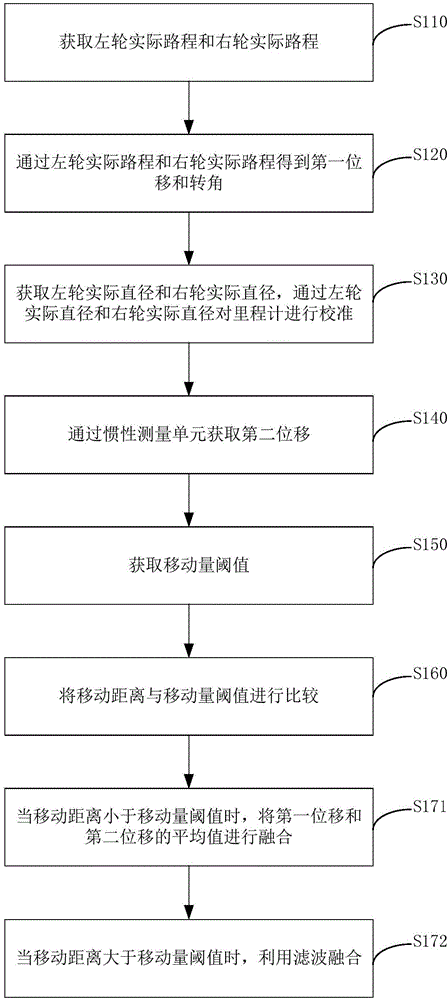
The invention provides a stroke calibration method of a mobile robot. The stroke calibration method comprises the steps that the actual stroke of a left wheel and the actual stroke of a right wheel are obtained; first displacement and the turning angle are obtained according to the actual stroke of the left wheel and the actual stroke of the right wheel; the actual diameter of the left wheel and the actual diameter of the right wheel are obtained, and a milemeter is calibrated according to the actual diameter of the left wheel and the actual diameter of the right wheel; second displacement is obtained through an inertia measuring unit; a displacement amount threshold value is obtained; the displacement distance and the displacement amount threshold value are compared; when the displacement distance is smaller than the displacement amount threshold value, an average value of the first displacement and the second displacement is fused; and when the displacement distance is greater than the displacement amount threshold value, fusion is conducted through smoothing. The error correction of the milemeter is achieved, and the system positioning precision is improved.
Description
technical field [0001] The invention relates to the technical field of robot motion, in particular to a stroke calibration method of a mobile robot. Background technique [0002] With the development of robotics, the research on indoor service robots has gradually become a hot spot. In the smart home indoor positioning perception system, the robot's own positioning ability is extremely important for path planning. It is the key to the robot's autonomous navigation and is of great significance for improving the automation level of the robot. [0003] The current mobile robot chassis is mostly composed of two or three driving wheels. The odometer positioning method is an important relative positioning method. It belongs to the dead reckoning method and is the main method for mobile robot navigation and positioning in an unknown environment. The positioning method can simplify the basic problem of determining the pose. It only needs a single or even no external sensor informat...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B25J9/16
CPCB25J9/1607B25J9/1653
Inventor宋仕超凌清吴兴华陈猛
Owner创想智控科技(深圳)有限公司