

Sliding mode repetitive controller for motor servo system
A technology of repetitive controllers and servo systems, applied in general control systems, adaptive control, control/regulation systems, etc., and can solve problems such as complete suppression of non-periodic interference signals and chattering problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
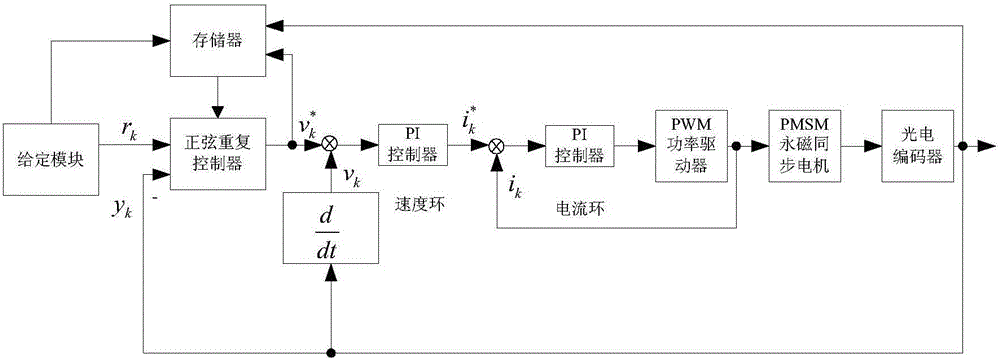
[0108] Example: Taking the motor servo system to perform repetitive tracking tasks as an example, its given position reference signal has periodic symmetry characteristics, and the motor sampling three-loop control, wherein the speed loop and current loop controllers are provided by the ELMO driver, and the repetitive design of the present invention The controller is used as the position loop controller in the motor three-loop control system, which is provided by the TMS320F2812 development board. Designing a position loop controller requires the establishment of mathematical models of servo objects other than the position loop, including current loops, speed loops, power drives, motor bodies, and detection devices. In this example, the effectiveness of the repetitive controller given by the present invention will be illustrated by numerical simulation.
[0109] For a position reference signal with periodic symmetry, when the servo system enters a steady state, the system dist...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More