

Indoor mobile robot cooperative system based on fuzzy algorithm and two-dimensional code self correction
A mobile robot and fuzzy algorithm technology, applied in two-dimensional position/channel control, control/adjustment system, instrument, etc., can solve the problems of high positioning cost and difficult path planning, achieve low-cost positioning, improve work efficiency, The effect of avoiding conflict
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with specific examples.
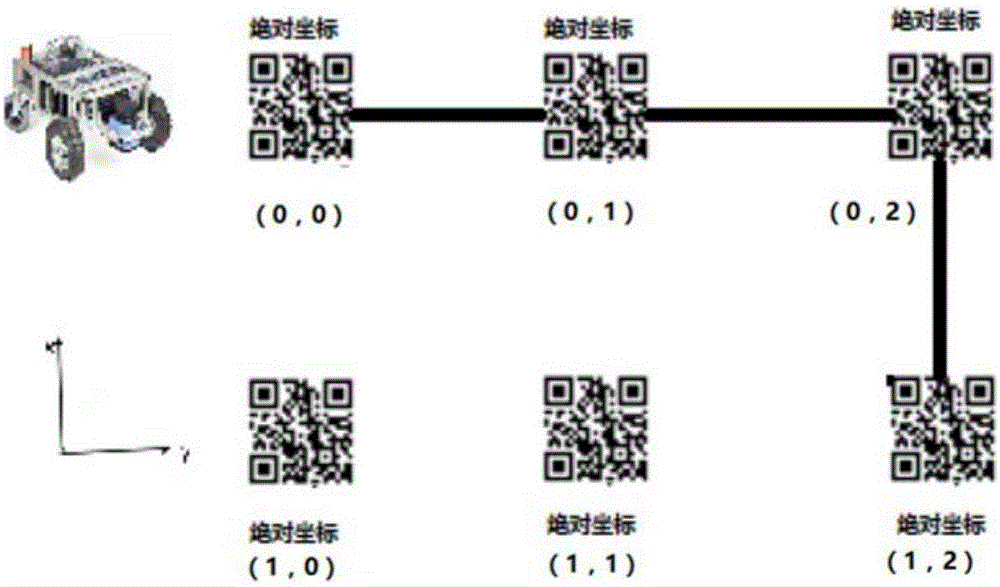
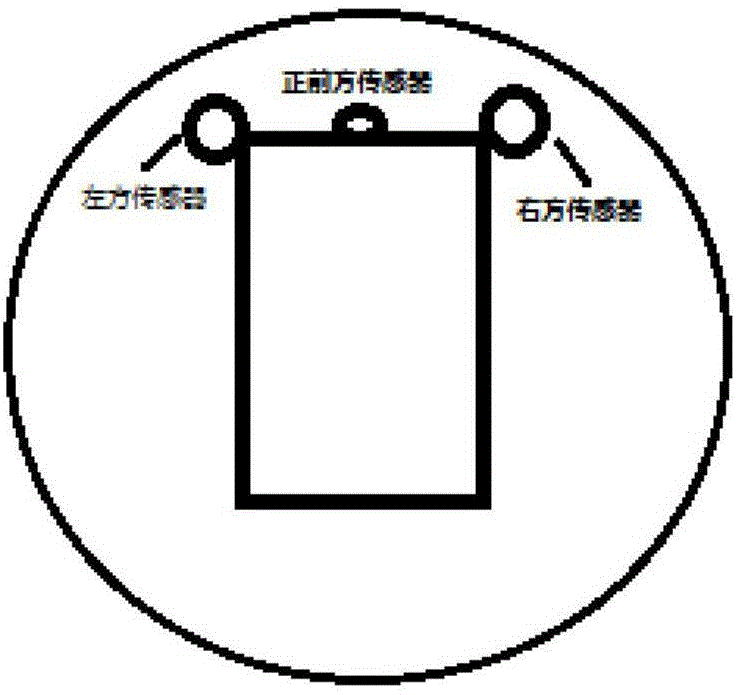
[0027] In this embodiment, the collaborative system includes several robot bodies and several two-dimensional codes distributed indoors. The robot body is equipped with a single-chip microcomputer, an accelerometer module, a gyroscope module, a two-dimensional code recognition module, a communication module and an ultrasonic sensor. The MCU uses STM32, the accelerometer and gyroscope module can be selected: GY-521 MPU6050 module, the two-dimensional code recognition module is: N5680 of Honeywell, which can obtain the two-dimensional code, and has a supplementary light device and a camera to take pictures.
[0028] Acquisition of coordinates:
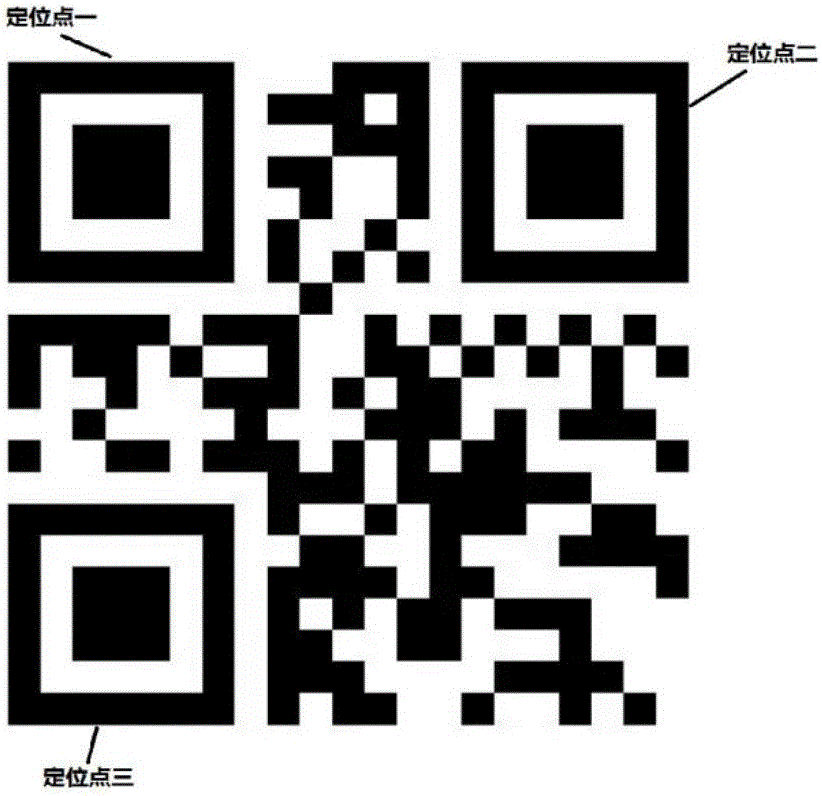
[0029] This system places a specific two-dimensional code in a specific place indoors, and establishes a two-dimensional coordinate system indoors. The indoor position coordinates are represented by QR codes, and the coordinates of each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More