

Rotatable exoskeleton mechanical leg for lower limb rehabilitation robot
A rehabilitation robot and mechanical leg technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as difficult promotion and commercialization of products, difficulty in getting on and off equipment for patients, and complicated devices, so as to increase difficulty, increase speed, overcome The effect of placeholder influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
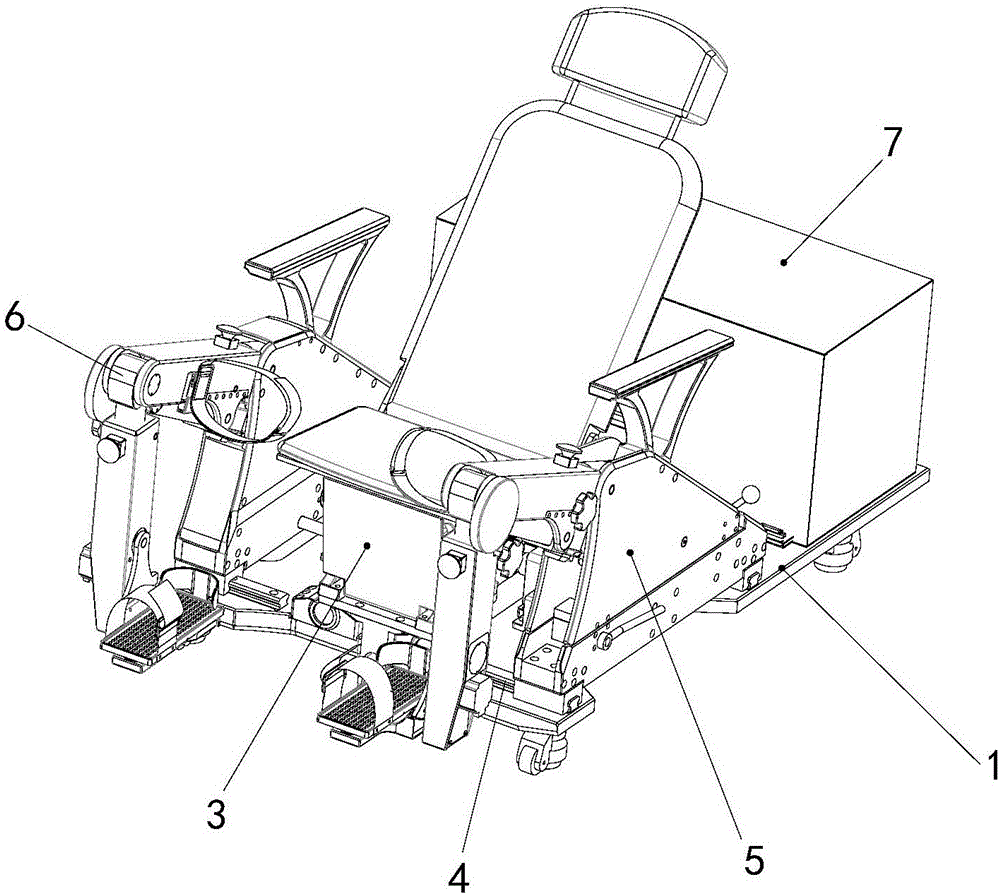
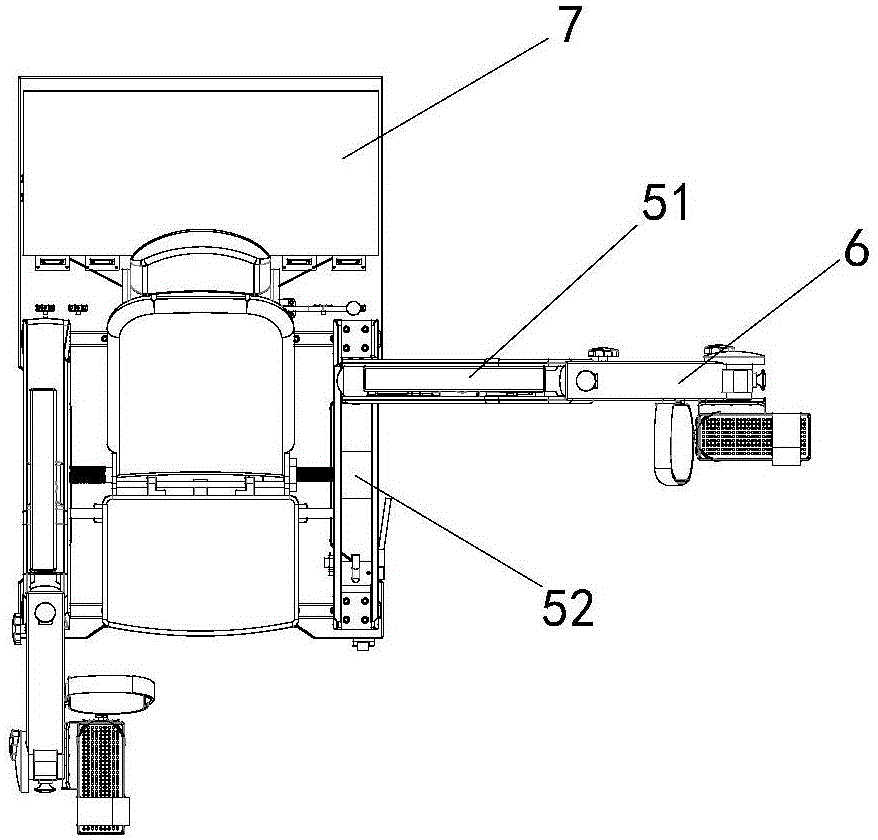
[0034] see figure 1 , the lower limb rehabilitation robot involved in the present invention includes a base 1 , a seat 3 , a hip joint width adjustment mechanism 4 , a mechanical leg fixing platform 5 , a mechanical leg 6 and a counterweight control box 7 .
[0035] Cooperate see Figure 5 , the base 1 in the present invention includes a bottom plate 11, four casters 12 are installed under the bottom plate 11, and a linear guide rail 54 and a screw fixing table 41 are installed above the bottom plate 11.
[0036] Cooperate see Figure 9 , the hip joint width adjustment mechanism 4 in the present invention is erected on the base and can be adjusted left and right. It comprises screw mandrel fixed table 41, screw mandrel 42, screw mandrel nut 43 and motor transmission mechanism 44; Connect the left and right screw nuts 43, the motor transmission mechanism 44 is installed on the screw fixing table 41 and connected with the screw rod 42 in transmission, the left and right screw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More