

A Vertical Plane Control Method for Underwater Robot
A technology of underwater robot and control method, which is applied in the direction of attitude control, height or depth control, etc., can solve the problems of weak anti-interference ability, lagging control process, difficult to remove high-frequency chattering phenomenon, etc., to achieve engineering application, Strong robustness, convenient and quick adjustment effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention is described in detail below in conjunction with accompanying drawing.
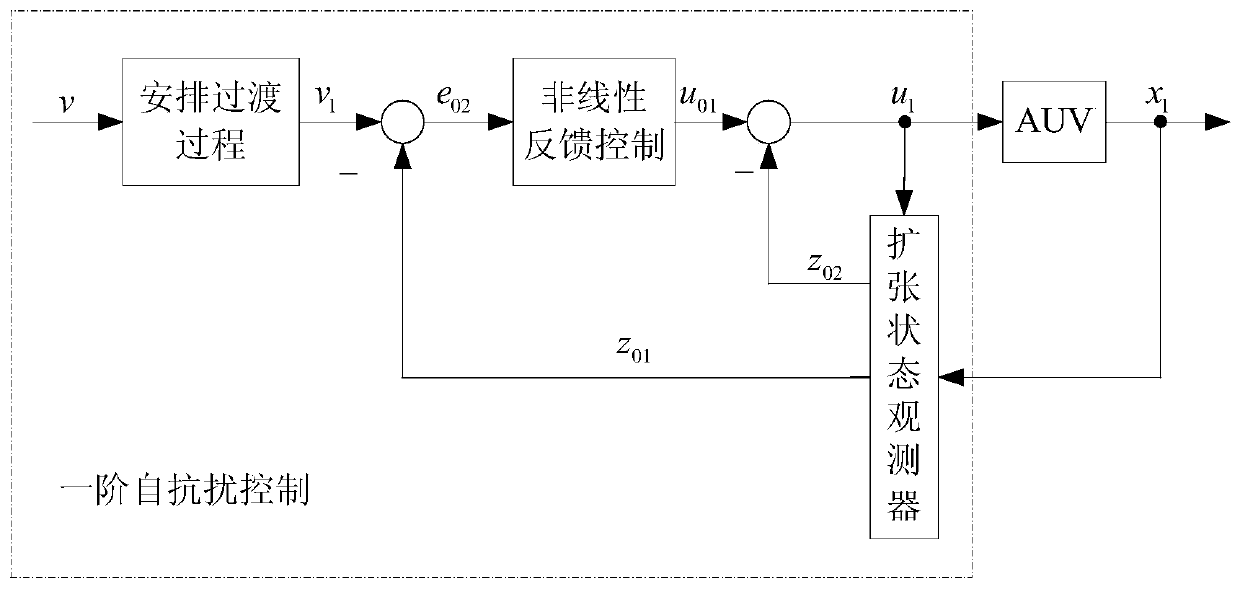
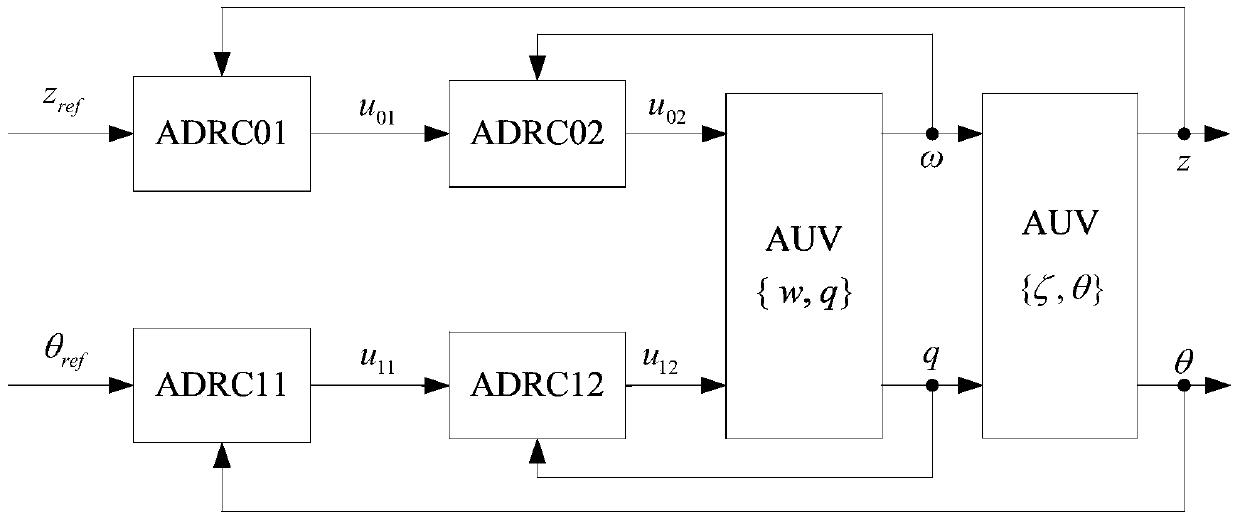
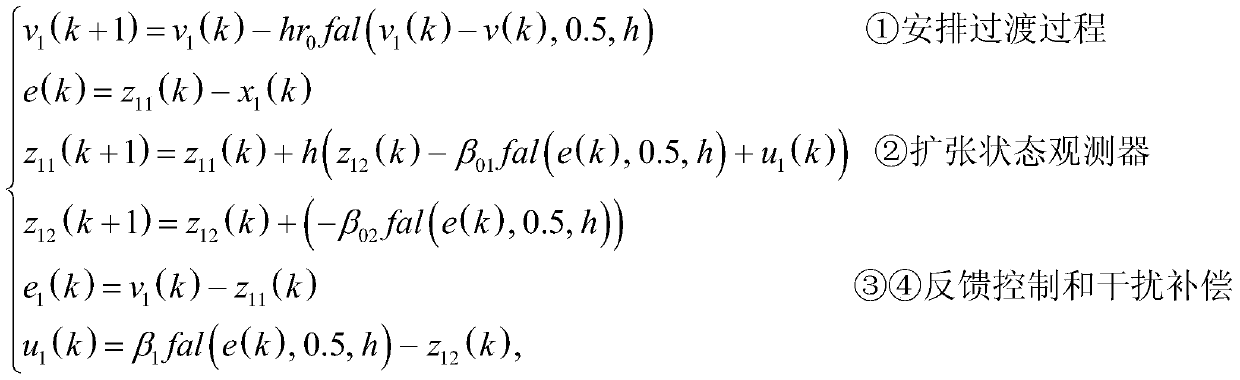
[0026] The vertical surface cascade control method of the underwater robot based on the active disturbance rejection control technology of the present invention comprises the following steps:
[0027] Step 1: Establish the vertical plane kinematics model of the underwater robot, described as follows:
[0028] Vertical force equation:
[0029]
[0030] Trim moment equation:
[0031]
[0032] Attitude and position equations:
[0033]
[0034]
[0035] The above model parameters are shown in Table 1.
[0036] Table 1 Carrier geometric parameters
[0037] symbol
definition
unit
B
Carrier underwater buoyancy
Newton
W
carrier underwater gravity
Newton
m
underwater quality
kilogram
L
Carrier length
rice
θ,q
Carrier pitch angle and pitch angular velocity
rad and rad / s
w
Ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More