

Vertical plane control method for underwater robot
An underwater robot and control method technology, applied in attitude control, height or depth control and other directions, can solve the problems of weak anti-interference ability, lag control process, difficult to remove high-frequency chattering phenomenon, etc., to achieve convenient and quick adjustment, Beneficial for engineering applications and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below in conjunction with the drawings.
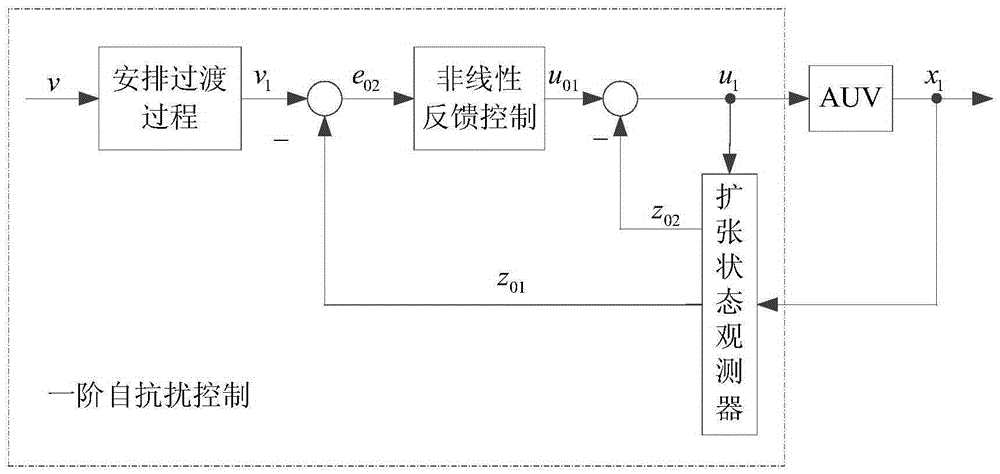
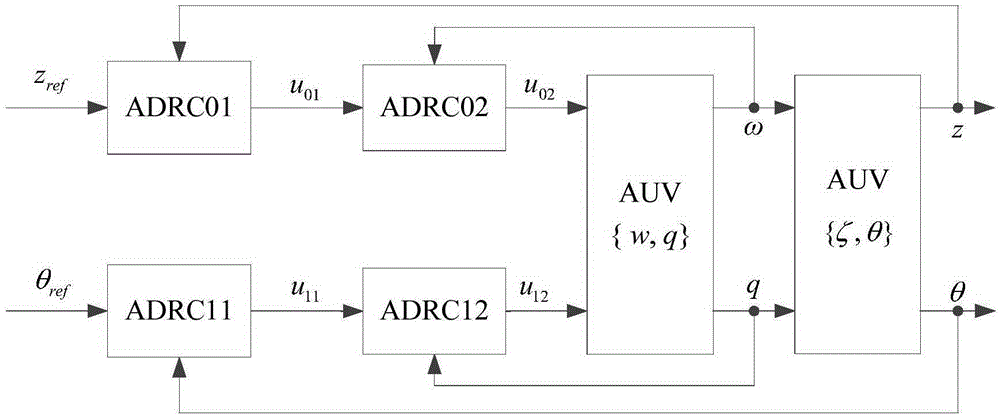
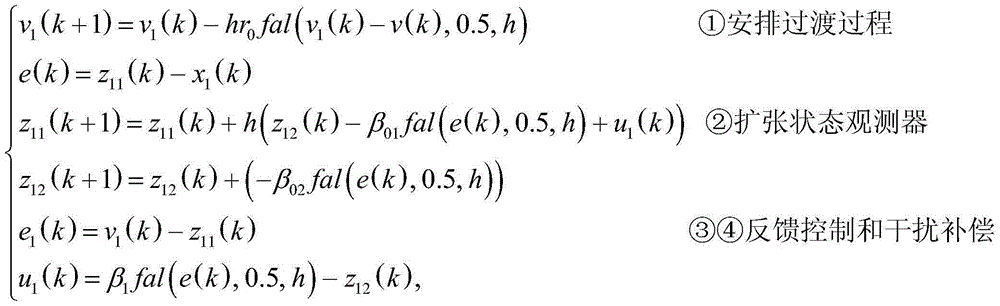
[0026] The vertical surface cascade control method of underwater robot based on active disturbance rejection control technology of the present invention includes the following steps:
[0027] Step 1: Establish the vertical kinematics model of the underwater robot, described as follows:
[0028] Vertical force equation:
[0029]
[0030] Trim moment equation:
[0031]
[0032] Posture and position equation:
[0033]
[0034]
[0035] The above model parameters are shown in Table 1.
[0036] Table 1 Carrier geometric parameters
[0037] symbol definition unit B Carrier underwater buoyancy Newton W Carrier underwater gravity Newton m Underwater quality kilogram L Carrier length Meter θ, q Carrier trim angle and trim velocity rad and rad / s w Vertical velocity of carrier M / s x B , Y B ,z B
The coordinates of the carrier floating center in the body coordinate system Meter xG,zG
The coordina...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More