

Method and system for smooth parking of a two-wheeled robot
A robot, stable technology, applied in general control systems, control/regulation systems, instruments, etc., to achieve smooth parking, ensure accuracy, and achieve the effect of intelligent control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
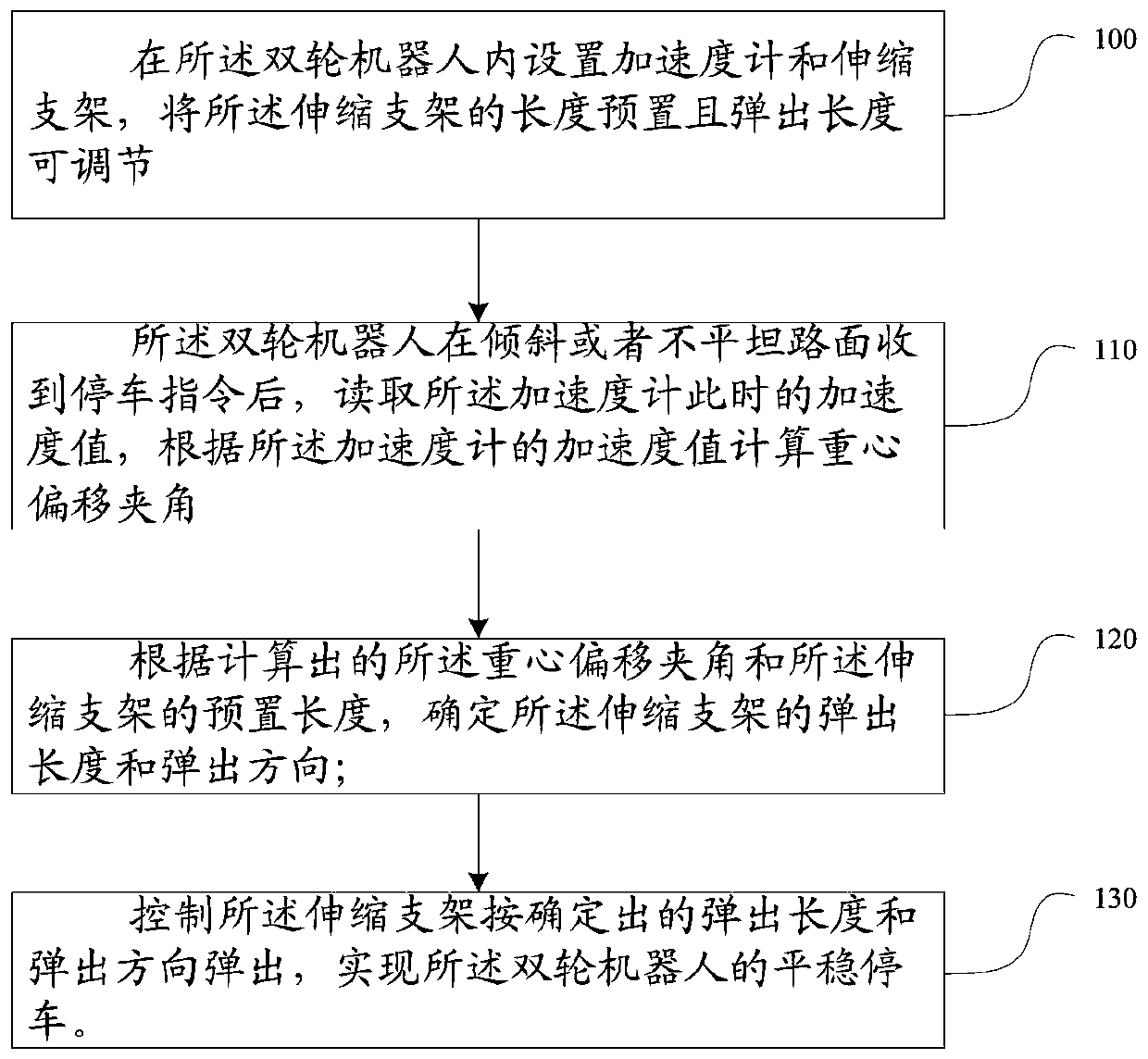
[0026] figure 1 It is a flow chart of a method for a two-wheeled robot to park smoothly provided by an embodiment of the present invention. refer to figure 1 , a method for smooth parking of a two-wheeled robot comprising:
[0027] Step S100, setting an accelerometer and a telescopic bracket in the two-wheeled robot, preset the length of the telescopic bracket and adjust the pop-up length;
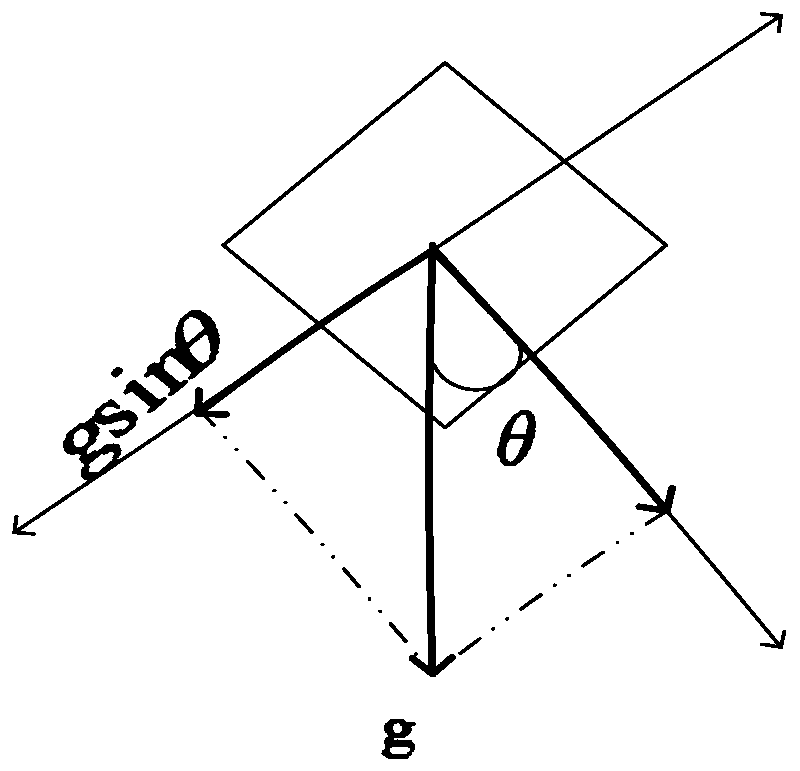
[0028] Step S110, the two-wheeled robot reads the acceleration value of the accelerometer at this time after receiving the parking instruction on the inclined or uneven road, and calculates the center of gravity offset angle according to the acceleration value of the accelerometer;
[0029] Step S120, determining the pop-up length and pop-up direction of the telescopic support according to the calculated center-of-gravity offset angle and the preset length of the telescopic support;
[0030] Step S130, controlling the telescopic support to pop up according to the determined pop-up lengt...
Embodiment 2
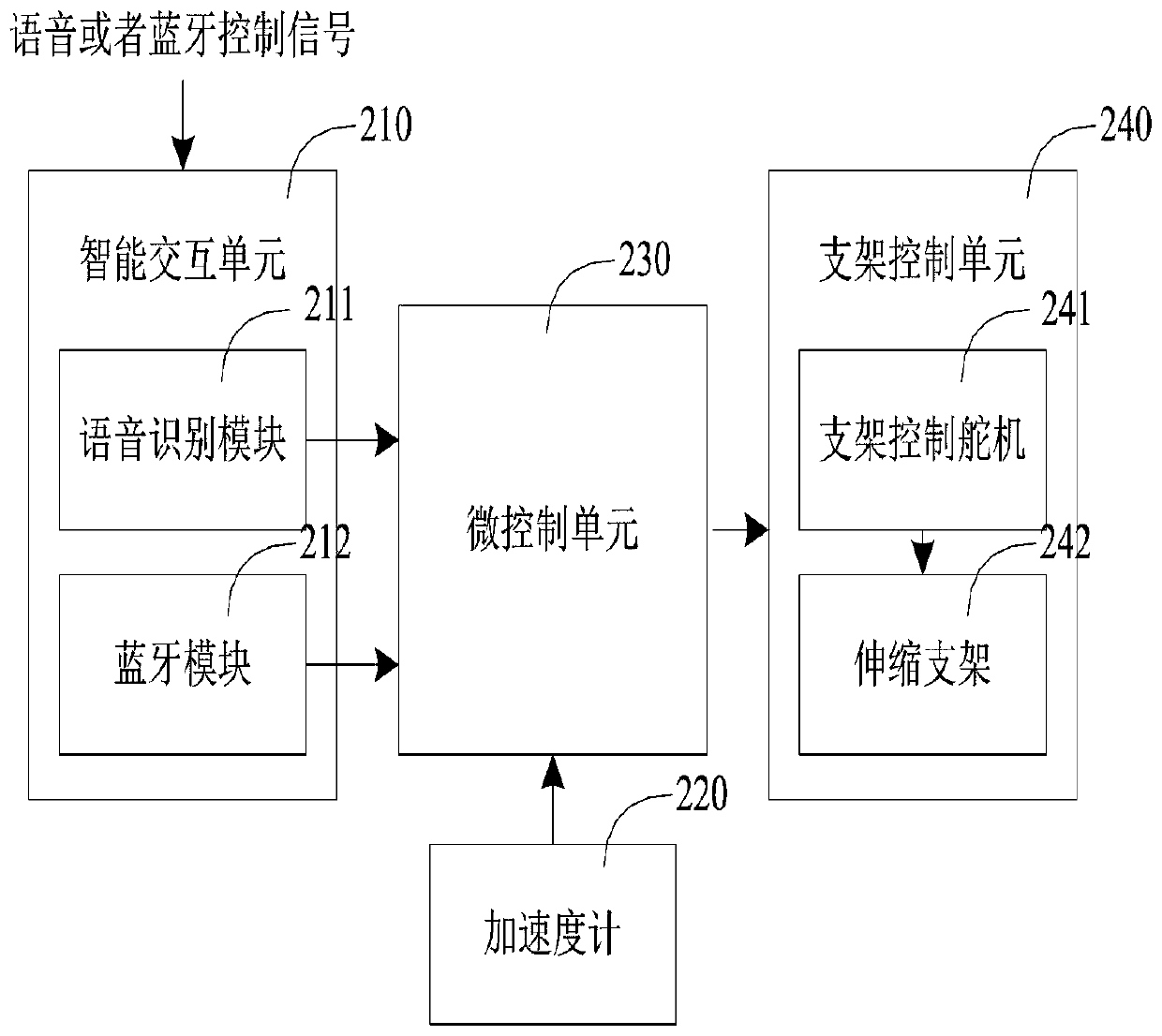
[0037] image 3It is a schematic diagram of a two-wheeled robot smooth parking system provided by an embodiment of the present invention, refer to image 3 , a stable parking system for a two-wheeled robot, comprising an intelligent interaction unit 210, an accelerometer 220, a micro control unit 230 and a support control unit 240, wherein the support control unit 240 includes a support control steering gear 241 and a telescopic support 242, while the telescopic support 242 The length is preset, and the pop-up length can be adjusted;
[0038] The intelligent interaction unit 210 is used to receive the user's parking instruction and send it to the micro control unit 230;
[0039] The accelerometer 220 is used to detect the acceleration value of the two-wheeled robot on inclined and uneven road surfaces;
[0040] The micro control unit 230 is configured to read the acceleration value of the accelerometer 220 when receiving the parking instruction sent by the intelligent intera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More