

Cleaning robot and method for complete-coverage path planning of cleaning robot under dynamic environment
A technology for cleaning robots and dynamic environments, applied to instruments, measuring devices, re-radiation of electromagnetic waves, etc., can solve problems such as robot coverage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make those skilled in the art better understand the technical solutions of the present invention, the technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described The embodiments are only some of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
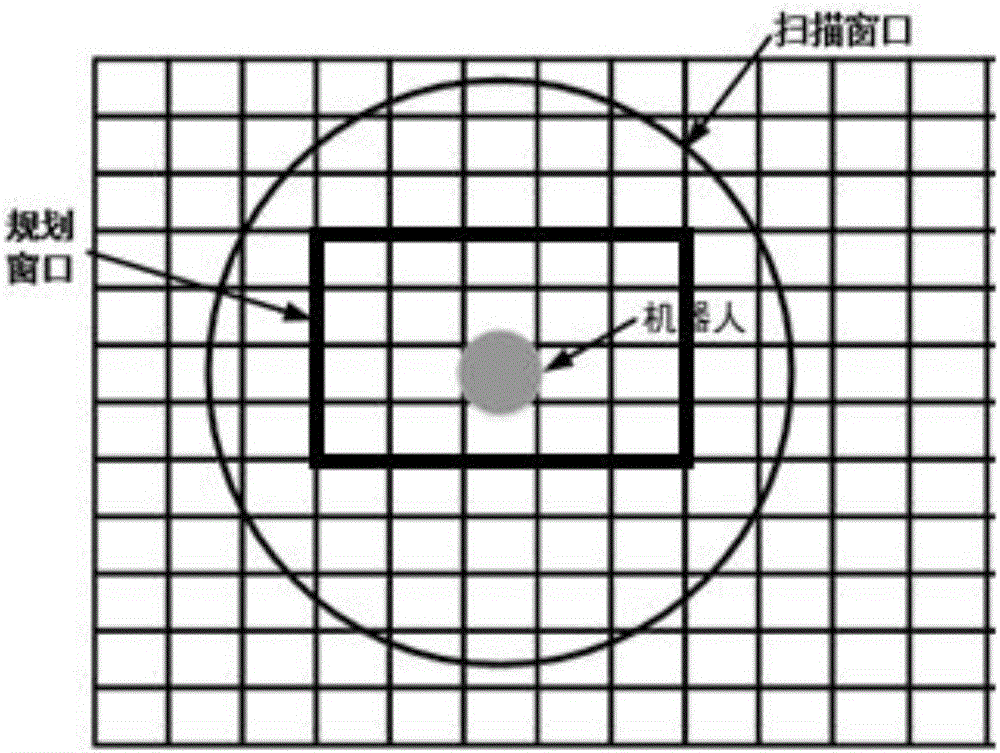
[0035] An embodiment of the present invention discloses a cleaning robot. The cleaning robot is equipped with a laser radar sensor. The laser radar sensor can perform 360° rotation scanning to obtain environmental information in a rolling window, so as to ensure that the area around the cleaning robot can be detected in re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More