

Compliant and coordinated control method for in-orbit capturing process of space robot
A space robot and compliant control technology, applied in the space field, can solve the problems of ignoring the complex contact and collision process of the capture process, the singularity of the robotic arm, and the short-term grabbing process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] In order to make the purpose, technical solution and advantages of the present invention clearer, the following will further describe the public implementation manners of the present invention in detail with reference to the accompanying drawings.
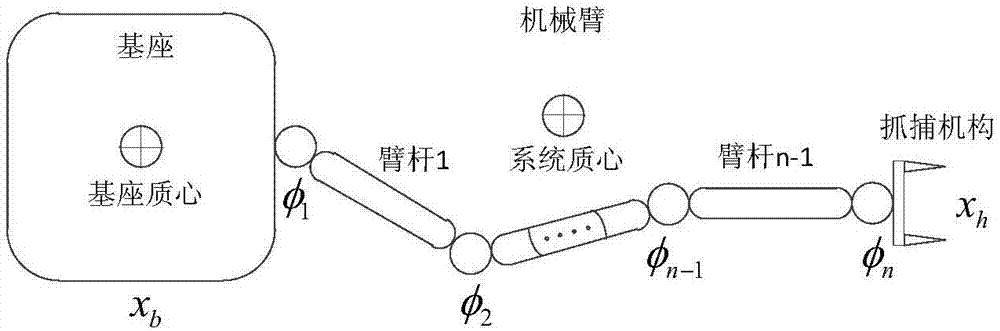
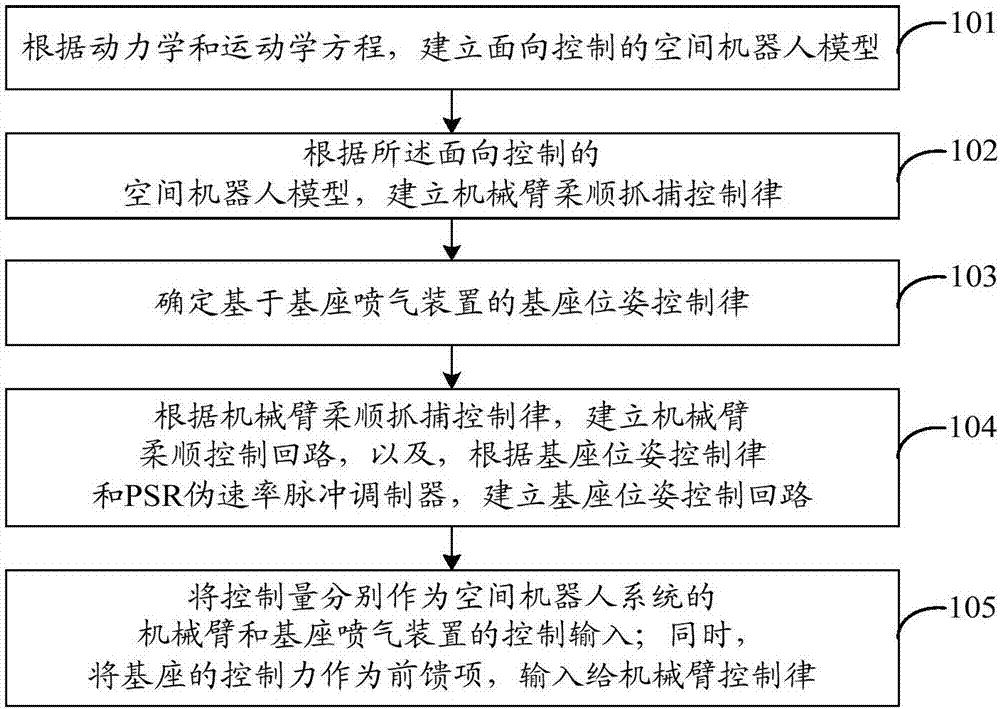
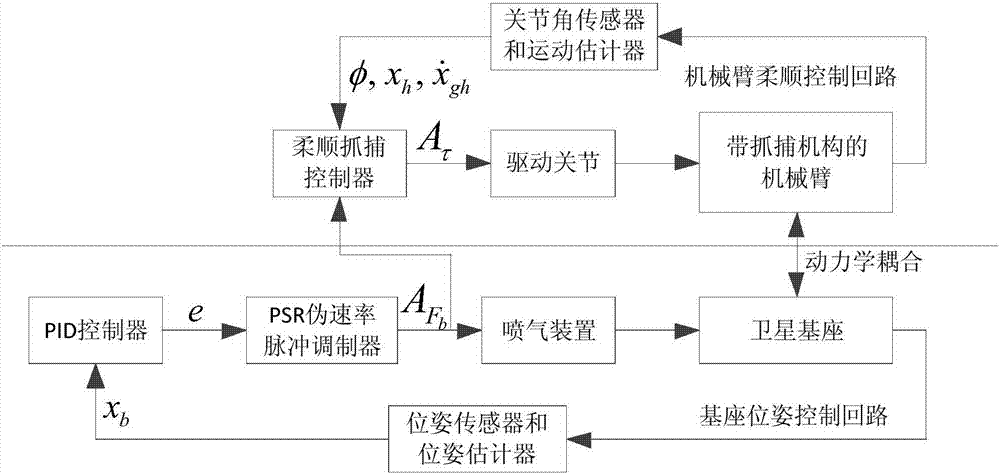
[0078] Aiming at the control problem of space robot grabbing spinning or rolling non-cooperative targets on orbit, this invention provides a method of compliant grabbing and coordinated control of base-arm-grabbing mechanism. Through the control method described in this embodiment, before and during the collision of the target captured by the space robot, the spin control of the capture mechanism relative to the angular velocity direction of the target can be realized, and the mass of the end of the mechanical arm relative to the inertial space is similar to - The compliant nature of the damper-spring system, and the pose stability of the base relative to the inertial space. refer to figure 1 , shows a structural block diag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More