

Whole lower extremity exoskeleton and operation method thereof
An exoskeleton, full lower extremity technology, applied in medical science, sensors, diagnostic recording/measurement, etc., can solve problems such as lack of autonomous balance ability and inability to free hands, and achieve the effect of reducing the burden on lower limbs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
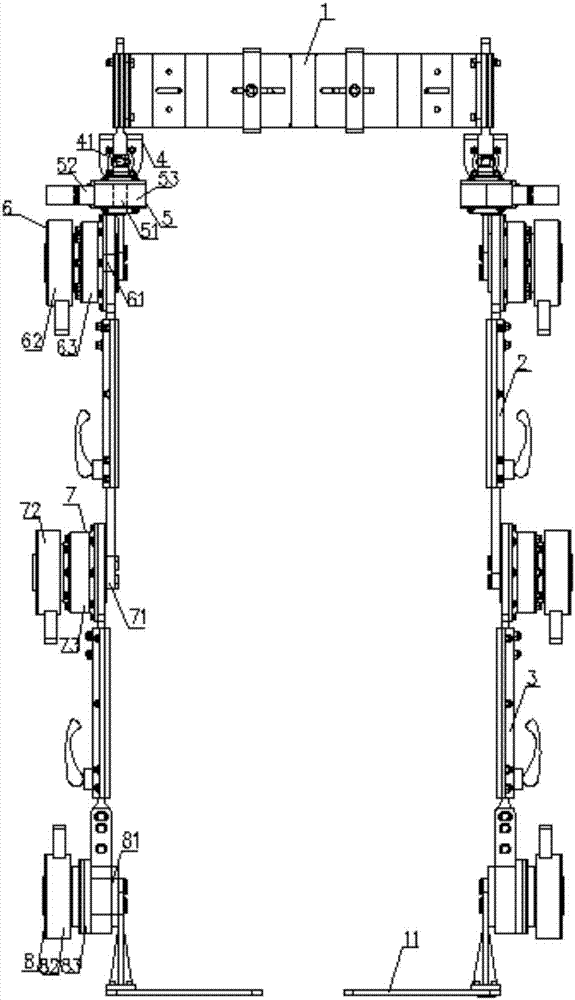
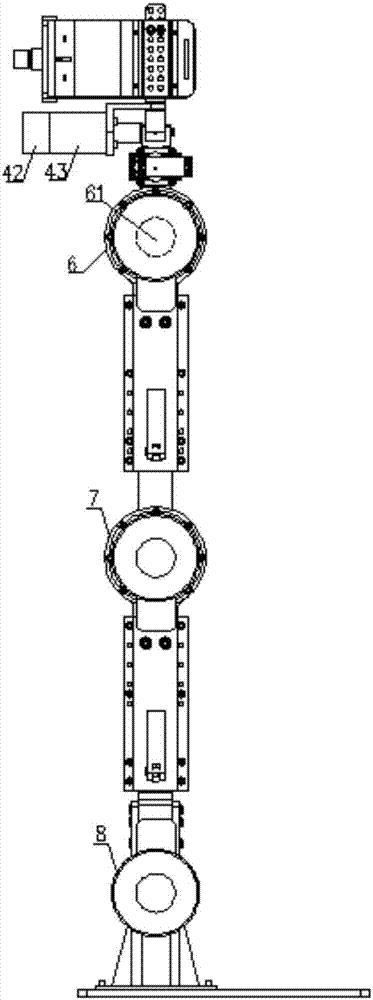
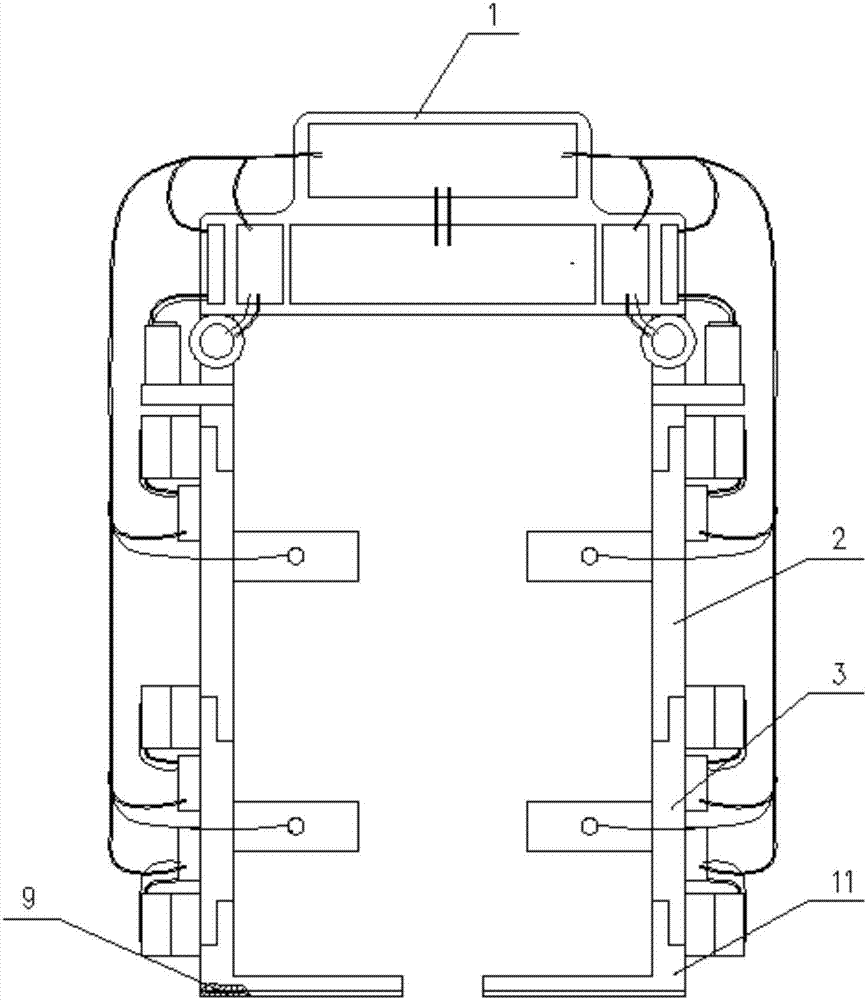
[0027] Full lower extremity exoskeleton, such as Figure 1-2As shown, including the skeletal system, the skeletal system includes the waist hip frame 1, the left leg frame and the right leg frame, the left leg frame and the right leg frame both include the thigh part 2, the calf part 3 and the foot part 11, the waist hip frame 2 and the thigh Between the parts 3, an auxiliary leg extension device 4, an auxiliary leg internal rotation device 5 and an auxiliary leg extension device 6 are arranged, and the auxiliary leg extension device 4 and the auxiliary leg rotation device 5 are arranged on the upper side of the auxiliary leg extension device 6. The auxiliary leg internal and external rotation device 5 includes a first rotating shaft 51, and the direction of the first rotating shaft 51 is perpendicular to the horizontal plane.
Embodiment 2
[0029] Full lower extremity exoskeleton, such as Figure 1-2 As shown, including the skeletal system, the skeletal system includes the waist hip frame 1, the left leg frame and the right leg frame, the left leg frame and the right leg frame both include the thigh part 2, the calf part 3 and the foot part 11, the waist hip frame 1 and the thigh An auxiliary leg extension device 4, an auxiliary leg rotation device 5 and an auxiliary leg extension device 6 are arranged between the parts 2, and the auxiliary leg extension device 4 and the auxiliary leg rotation device 5 are arranged on the upper side of the auxiliary leg extension device 6. The auxiliary leg internal and external rotation device 5 includes a first rotating shaft 51, and the direction of the first rotating shaft 51 is perpendicular to the horizontal plane. The auxiliary leg adduction device 4 is arranged on the upper side of the auxiliary leg adduction device 5 .
Embodiment 3
[0031] Full lower extremity exoskeleton, such as Figure 1-2 As shown, including the skeletal system, the skeletal system includes the waist hip frame 1, the left leg frame and the right leg frame, the left leg frame and the right leg frame both include the thigh part 2, the calf part 3 and the foot part 11, the waist hip frame 1 and the thigh An auxiliary leg extension device 4, an auxiliary leg rotation device 5 and an auxiliary leg extension device 6 are arranged between the parts 2, and the auxiliary leg extension device 4 and the auxiliary leg rotation device 5 are arranged on the upper side of the auxiliary leg extension device 6. The auxiliary leg internal and external rotation device 5 includes a first rotating shaft 51, and the direction of the first rotating shaft 51 is perpendicular to the horizontal plane. The auxiliary leg adduction device 4 is located at the lower side of the auxiliary leg adduction device 5 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More