

External skeleton type gait rehabilitation training device
A rehabilitation training and exoskeleton technology, which is applied in medical science, sensors, passive exercise equipment, etc., can solve problems such as difficult rehabilitation training, the impact of walking platform human gait, and the inability to directly drive lower limb joints, etc., to eliminate the impact and reduce The effect of load on the lower extremities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026]The present invention is further described below in conjunction with embodiment and accompanying drawing.
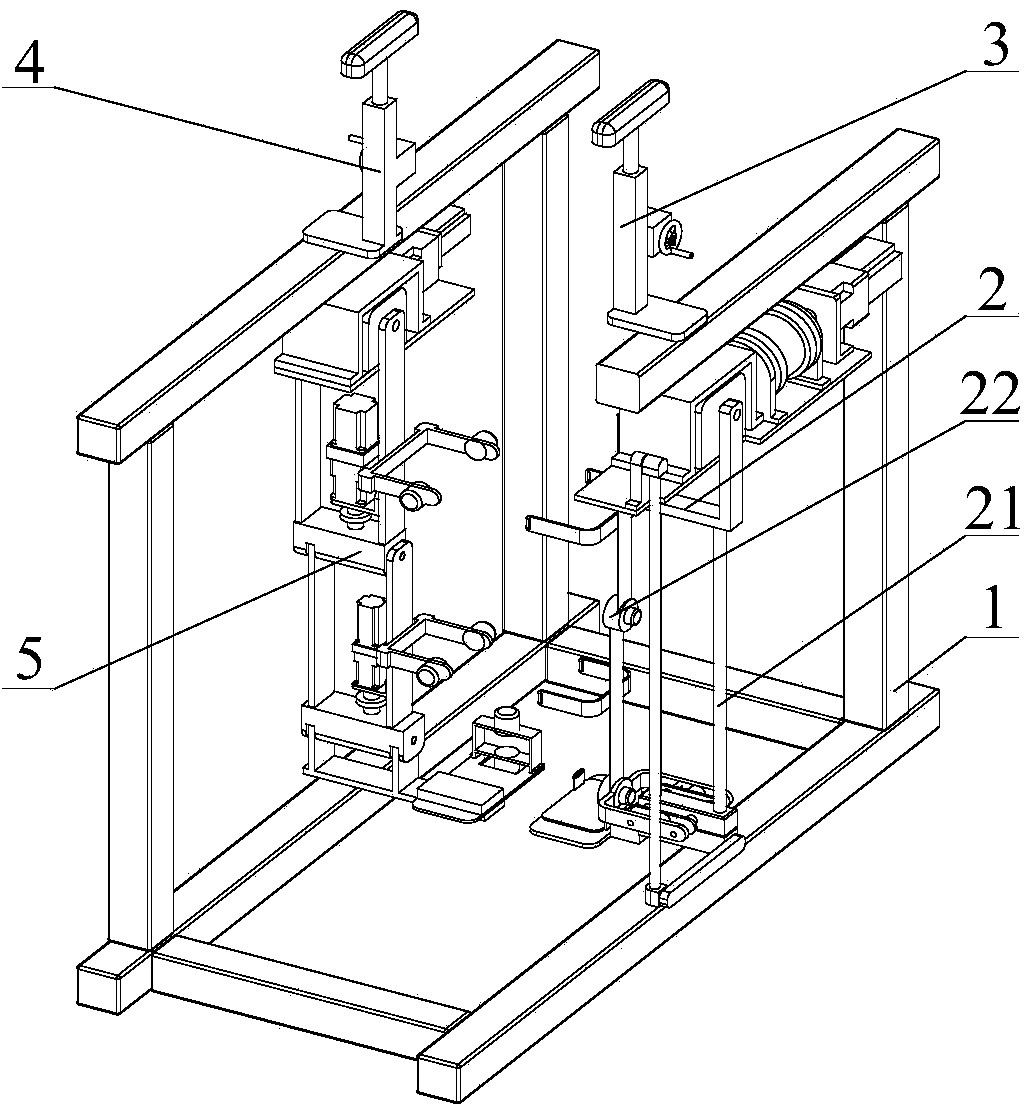
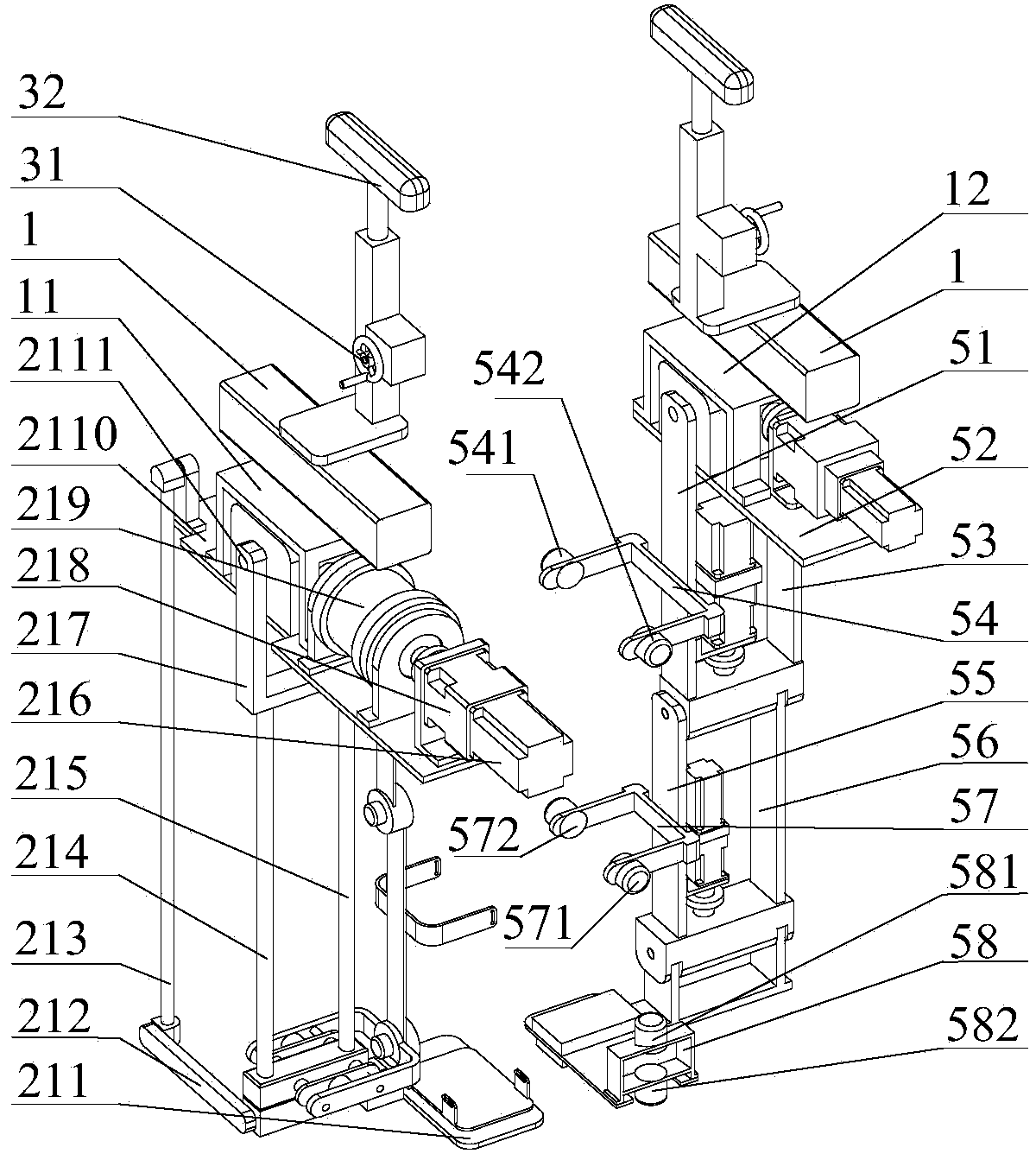
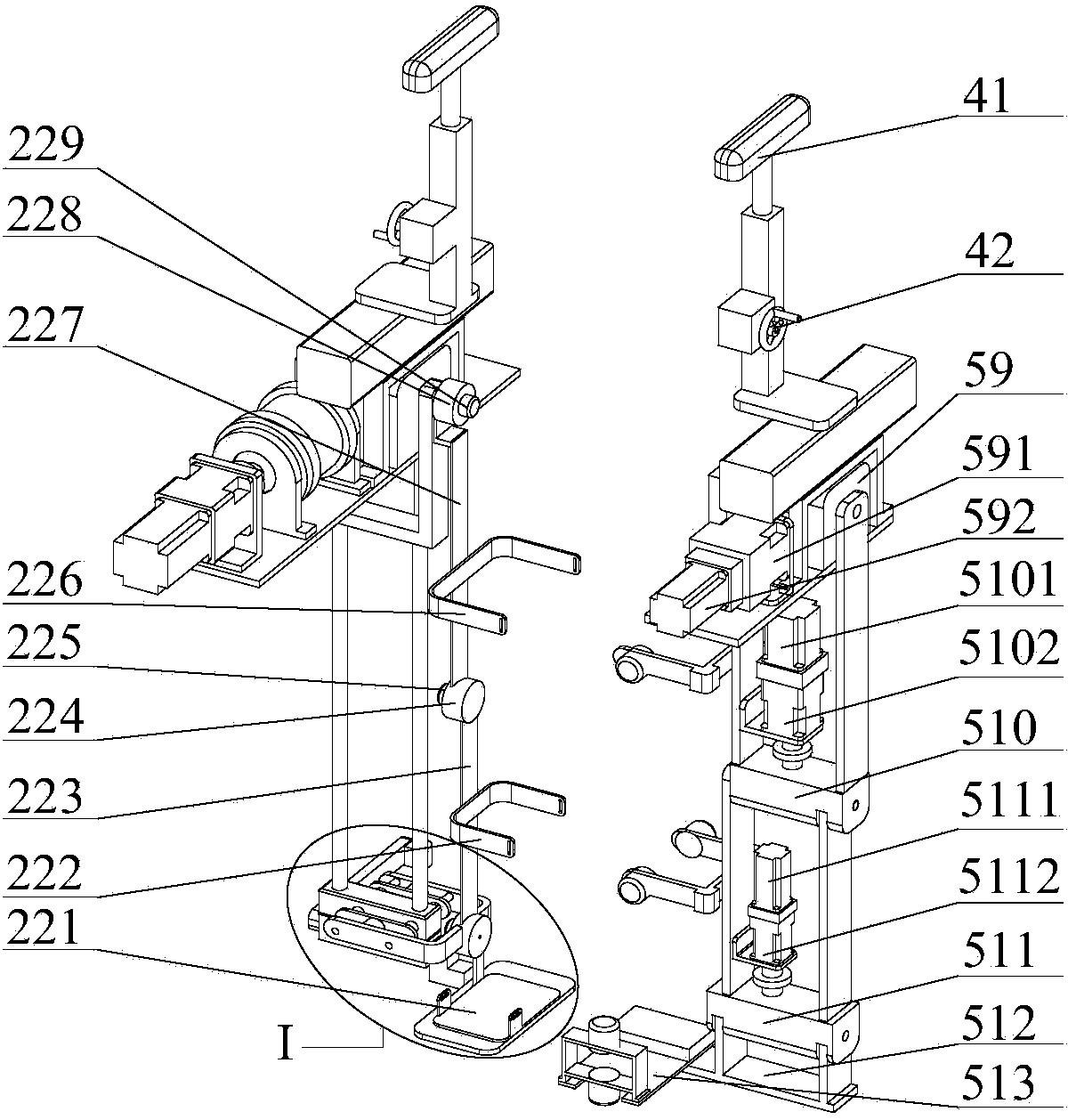
[0027] The lower extremity exoskeleton rehabilitation training device designed by the present invention (abbreviation device, see Figure 1-4 ), mainly including bracket 1, exoskeleton system 2 on the healthy limb side, underarm support mechanism 3 on the healthy limb side, underarm support mechanism 4 on the affected limb side, and exoskeleton system 5 on the affected limb side (see figure 1 ).
[0028] The bracket 1 includes a bracket main body, a connecting frame 11 on the side of the healthy limb and a connecting frame 12 on the side of the affected limb;
[0029] The exoskeleton system 2 on the side of the healthy limb is composed of an in situ walking system 21 with a planar four-bar structure and an exoskeleton type healthy limb joint motion parameter detection system 22 (see figure 1 ); the in situ walking system 21 includes a supporting plate 211, a lowe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More