

Field obstacle avoidance path planning and control method for unmanned agricultural machine
A technology of unmanned driving and path planning, which is applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control, etc. advanced questions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The present invention will be further described below in conjunction with the accompanying drawings.
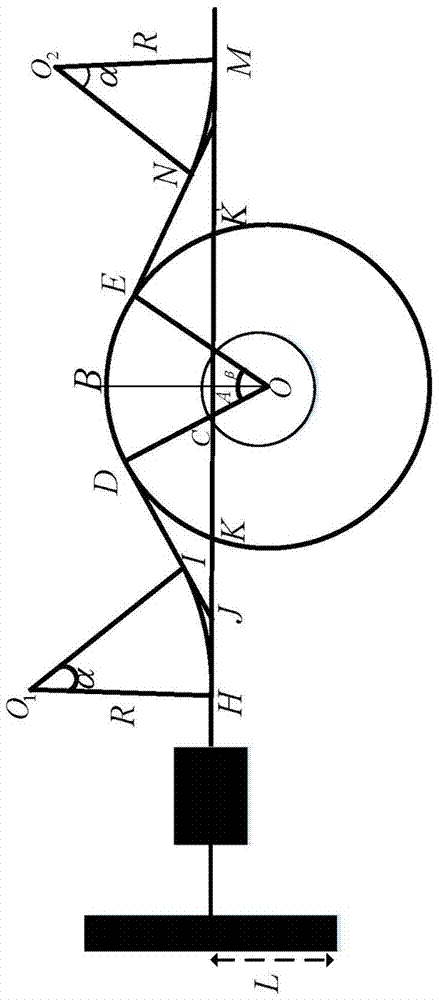
[0079] like Figures 1 to 11 A field obstacle avoidance path planning and control method for unmanned agricultural machinery is shown. The specific steps for the agricultural machinery to automatically avoid obstacles are as follows:
[0080] Step 1: Obtaining agricultural machinery environmental information through sensors to make obstacle avoidance decisions;
[0081] Step 2: Use the improved shortest tangent method to calculate a theoretical obstacle avoidance path offline;
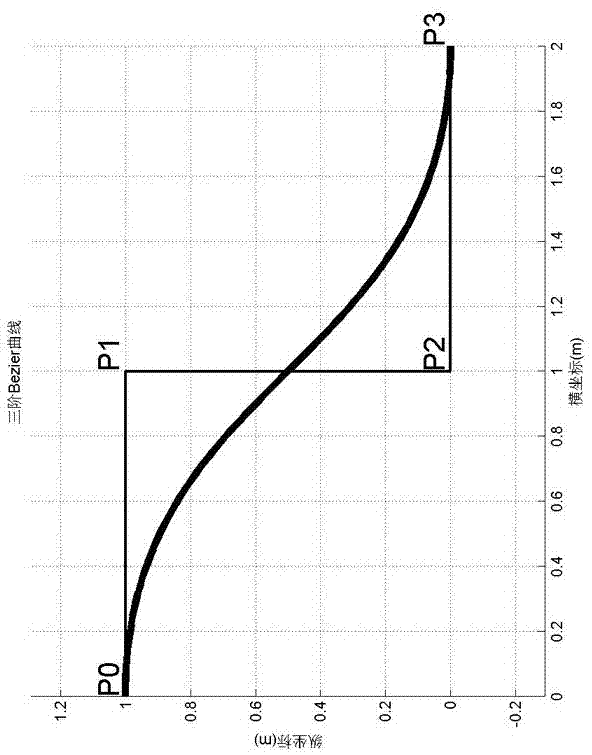
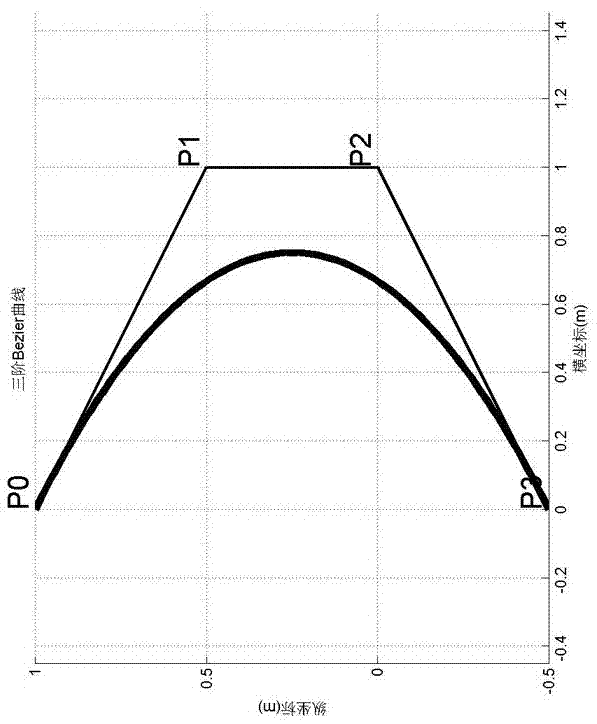
[0082] Step 3: Use the path optimization method based on Bezier curve to optimize the theoretical obstacle avoidance path in step 2 to obtain the actual obstacle avoidance path, use the curve tracking method to obtain the real-time curve curvature and real-time agricultural machinery heading deviation and lateral deviation, use the state feedback controller and The combination of the adaptive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More