

Calibration method for armor sensing component of robot, apparatus, and system
A technology for calibrating devices and calibrating methods, which is applied in the field of robots, can solve problems such as different damage values and loss of game fairness, and achieve the effect of ensuring fairness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
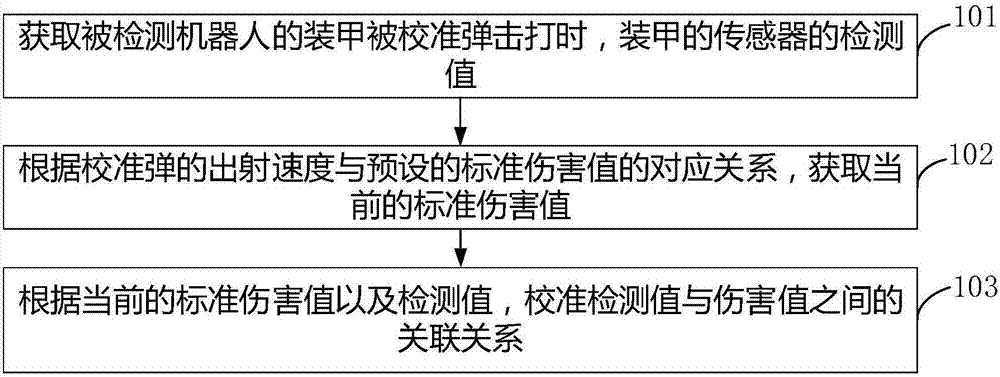
[0039] This embodiment provides a method for calibrating an armor sensing component of a robot, figure 1 It is a schematic flowchart of a method for calibrating an armor sensing component of a robot provided in Embodiment 1 of the present invention. This method can be applied to a control chip, a processor, and the like. like figure 1 As shown, the method includes:
[0040] Step 101, acquire the detection value of the sensor of the armor when the armor of the detected robot is hit by the calibration projectile.
[0041] In step 102, the current standard damage value is obtained according to the corresponding relationship between the ejection speed of the calibration bullet and the preset standard damage value.
[0042] Step 103, according to the current standard damage value and the detection value, the correlation between the detection value and the damage value is calibrated.
[0043] In order to avoid the problem of losing the fairness of the game caused by the different...
Embodiment 2
[0052] On the basis of the above-mentioned first embodiment, this embodiment makes a further supplementary description of the first embodiment.
[0053] Since the detection value of the sensor is related to the speed at which the calibration projectile hits the armor, multiple calibration projectiles are fired, and the firing speeds of the multiple calibration projectiles are different, so that the corresponding relationship between the firing speed and the detection of the sensor can be obtained more accurately.
[0054] Specifically, the correlation between the calibration detection value and the damage value can be implemented in the following manner:
[0055] A first implementation manner is: acquiring detection values, and determining an association model of an association relationship between detection values and damage values according to the number of detection values.
[0056] The correlation coefficient of the correlation model is obtained according to the detect...
Embodiment 3
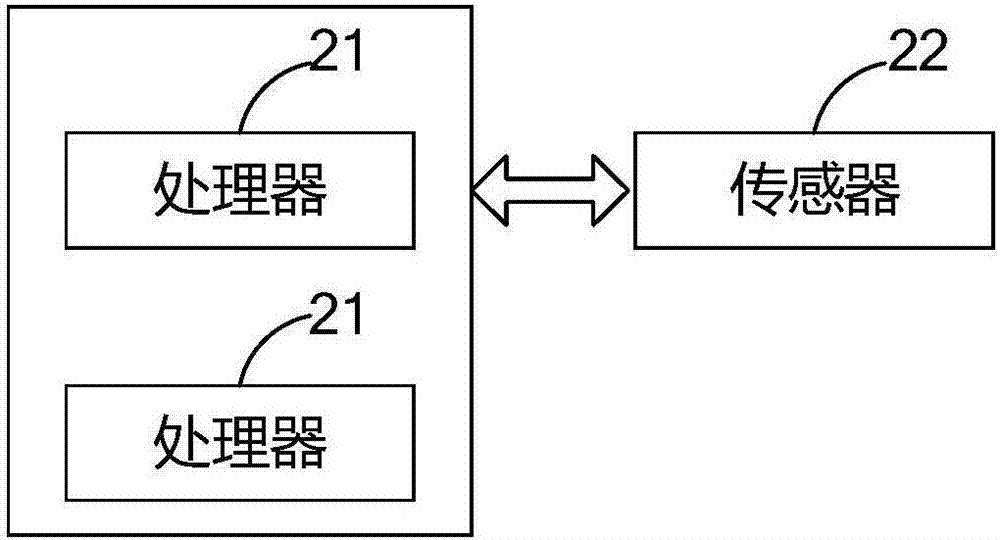
[0071] This embodiment provides a calibration system for the armor sensing component of a robot, figure 2 A schematic structural diagram of a calibration system for a robot's armor sensing component provided in Embodiment 3 of the present invention, as shown in figure 2 As shown, the calibration system includes: including: one or more processors 21, working individually or cooperatively, and the processors 21 are used to obtain the detection of the armor sensor when the armor of the detected robot is hit by the calibration bullet. value; according to the corresponding relationship between the ejection speed of the calibration bullet and the preset standard damage value, the current standard damage value is obtained; according to the current standard damage value and detection value, the correlation between the detection value and the damage value is calibrated.
[0072] Since there is a corresponding relationship between the ejection speed of the calibration bullet and the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More