

Power assisting device for robot arm
A technology of a power assist device and a robot arm, which can be applied to claw arms, manipulators, manufacturing tools, etc., and can solve problems such as restricting the enlargement of heavy robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
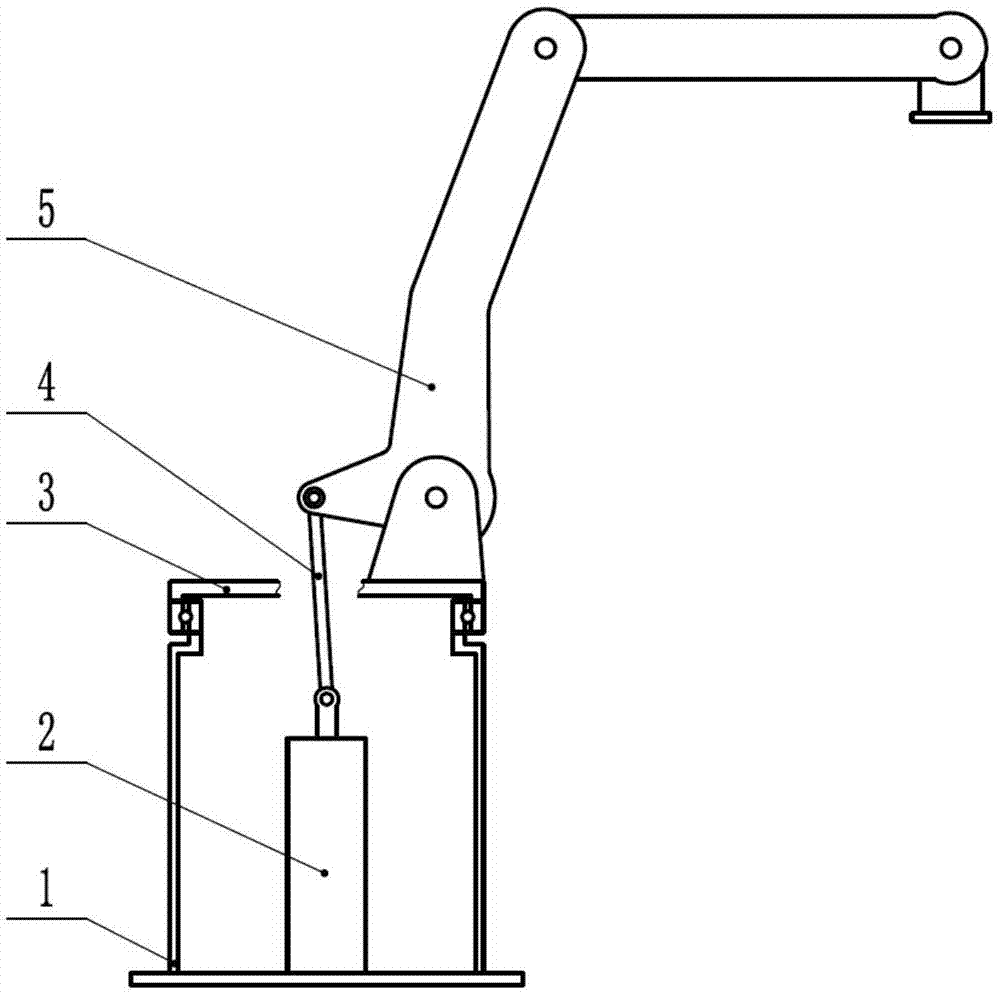
[0018] as shown in the picture 1 As shown, this example is a booster device for the first arm of the robot, which includes a booster power source (2) composed of a spring set arranged on the robot base (1), and an output end of the booster power source The connected rod-shaped transmission tool (4), the other end of the transmission tool is directly hinged with the robot arm (5).
[0019] During work, when the robot arm (5) swings outwards under the action of the load and performs a tilting action, the robot arm pulls the output end of the power assist power source (2) through the transmission (4) to lift upwards. At this time, the power assist power source (2) The spring in ) is compressed by force, and the transmission device (4) provides the robot arm with a reverse boost against the weight of the load. The more the robot arm swings outward, the more the booster power source (2) is compressed, and the greater the reaction force generated. This method can well meet the as...
Embodiment 2
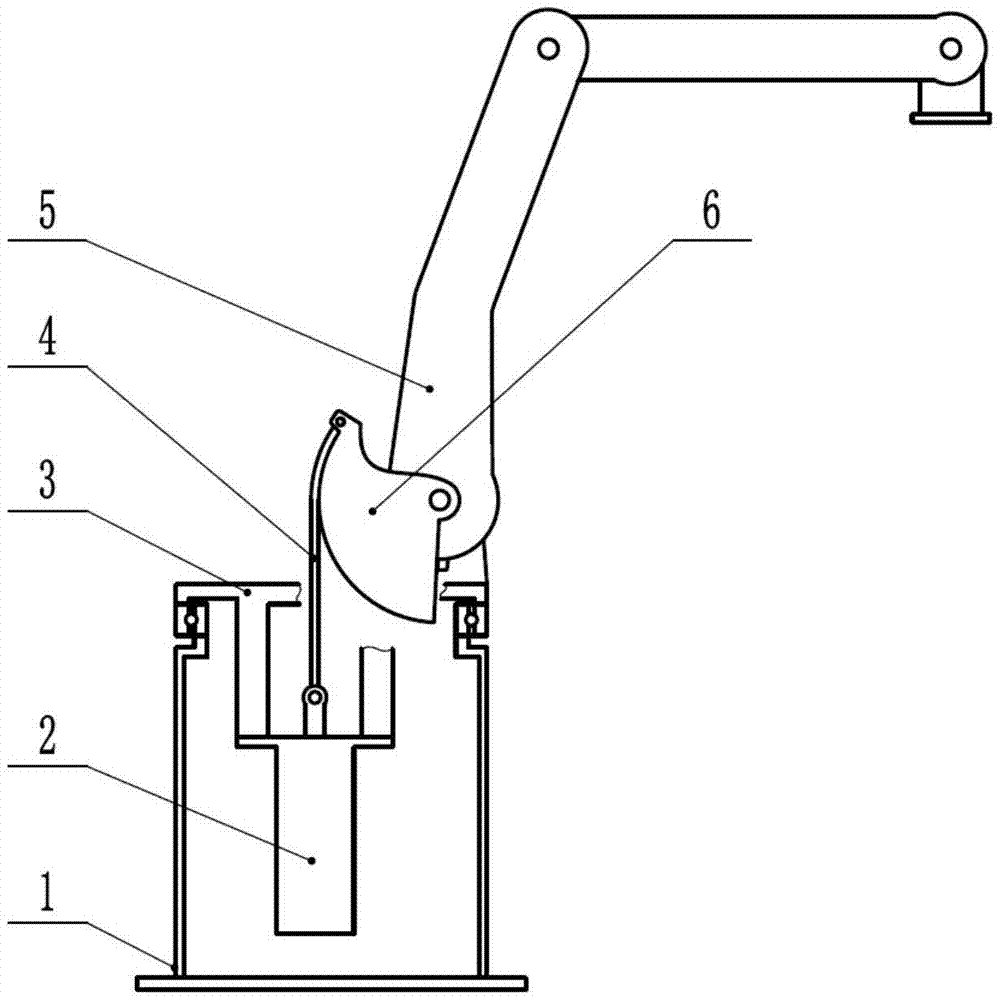
[0022] as shown in the picture 2 As shown, the other structure of this embodiment is the same as that of Embodiment 1, the difference is that: the booster power source (2) in this example is set on a one-axis rotating base (3) and rotates with the rotating base; the transmission (4) It is movably connected with the robot arm (5) through the transition block (6) fixed on the robot arm. The transition block (6) is designed with an arc-shaped outer edge; the transmission tool (4) is a flexible chain attached to the transition block ( 6) on the arc profile.
[0023] When working, the robot arm drives the transition block to swing, and the transition block pulls the output end of the power-assisted power source through the transmission chain. As the swing angle of the robot arm changes, the transmission chain always maintains the effect of the chain on the power-assisted source on the arc profile of the transition block. The direction of the force is relatively constant. In this...
Embodiment 3
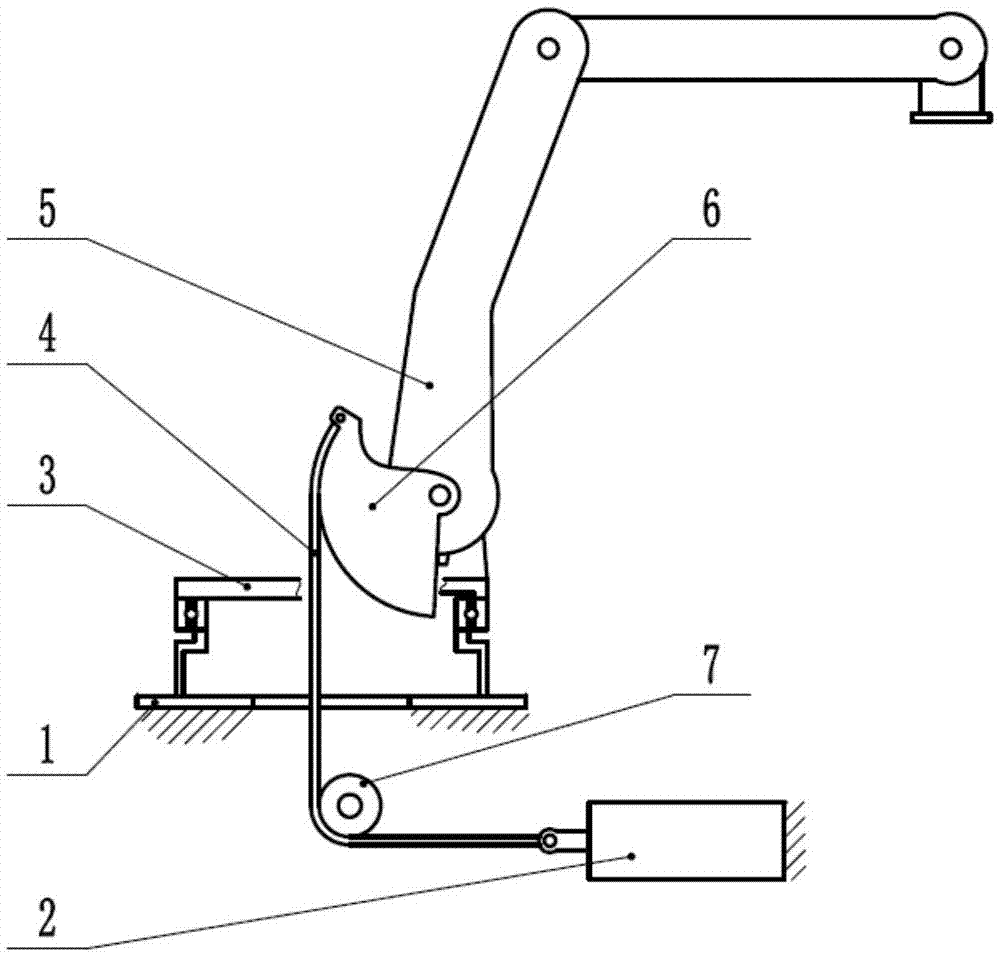
[0025] The other structure of this embodiment is the same as that of Embodiment 2, except that the transition block (6) is hinged on the robot arm (5), and there is a limit position on the robot arm, and the transition block can move within the limit stroke relative to the robot arm. Inward swing, the robot arm shrinks to a certain extent, when the assist force is no longer needed, the transition block is separated from the limit of the robot arm, and no assist is provided.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More