

Method and system for navigating port container unmanned vehicles by using port lights
A container and unmanned vehicle technology, applied in the field of navigation control, can solve problems such as path conflicts and complicated navigation methods, and achieve the effects of solving path conflicts, efficient navigation, and ensuring reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
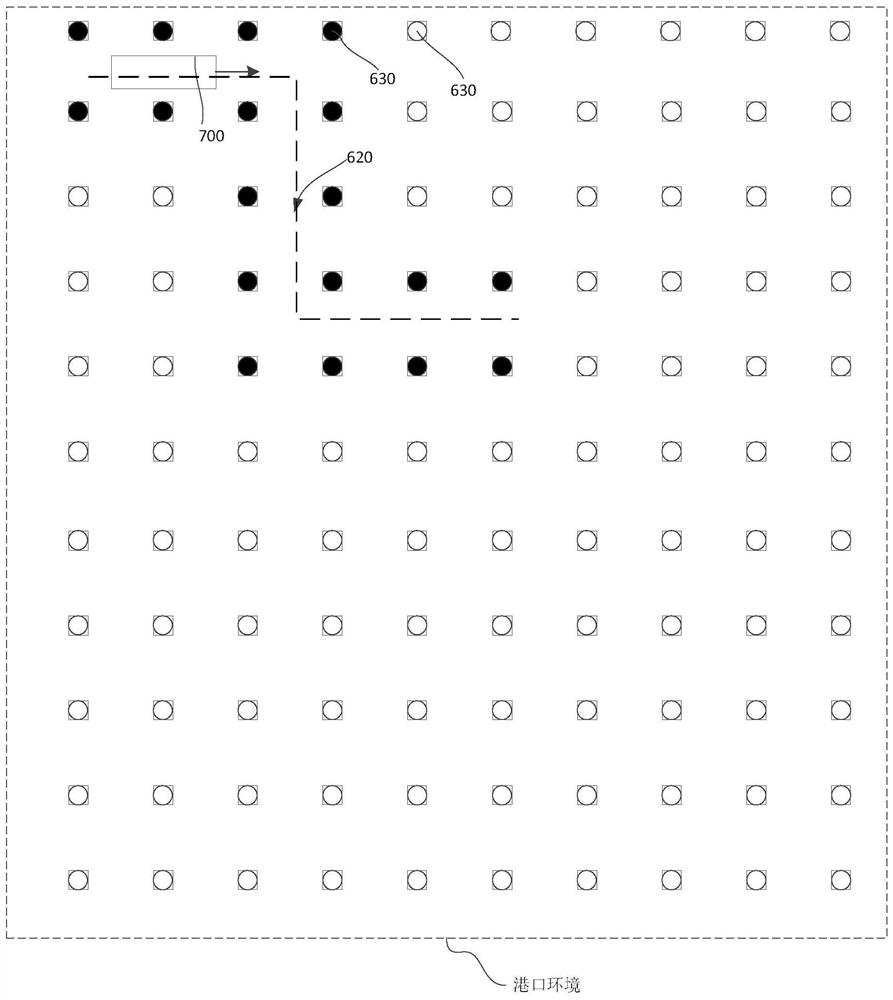
[0036] The port environment in the embodiment of the present invention is as figure 1 As shown, it includes a navigation lane 620, ground lights 630 located on both sides of the navigation lane 620, the ground lights 630 can control the color and frequency of the ground lights 630, and the port container unmanned vehicle 700 is located in the navigation In the roadway 620, control the color or frequency display to display the outline of the navigation roadway 620, and collect the image of the ground lights to obtain the navigation path. The distance between the ground lights 630 is 5m, and the width is the same as the The width and turning capacity of the unmanned vehicle 700 are adapted.
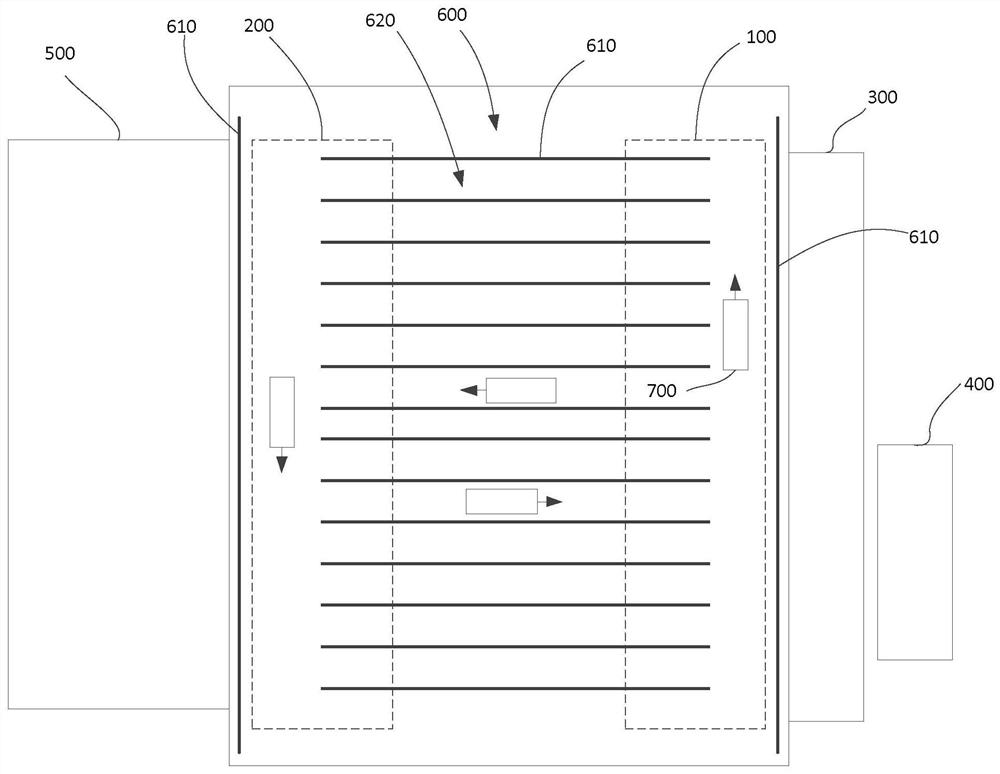
[0037] The port environment in the embodiment of the present invention can also be as figure 2As shown, it includes a loading area 100 and an unloading area 200. The loading area 200 is close to the quay bridge 300, and the cargo ship 400 is docked beside the quay bridge. The unloading ar...
Embodiment 2
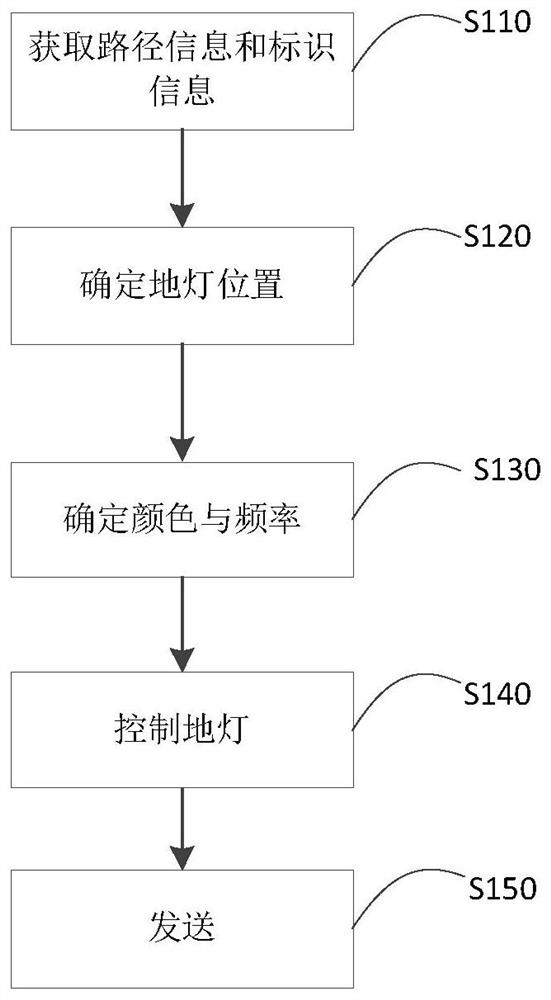
[0050] like Image 6 As shown, the embodiment of the present invention provides a method for navigating port container unmanned vehicles using port lights, including the following steps:
[0051] S210, receiving the location information of the floor lamp, the flickering color information of the floor lamp, and the flickering frequency information of the floor lamp;
[0052] S220, collecting the ground lamp image, analyzing and obtaining actual flickering color information and actual flickering frequency information;
[0053] S230, comparing the ground lamp blinking color information with the actual blinking color information, comparing the actual blinking frequency information with the ground lamp blinking frequency information, when the actual blinking color information includes the blinking color corresponding to the ground lamp blinking color information and / or Or when the actual blinking frequency information includes the blinking frequency corresponding to the ground lam...
Embodiment 3
[0057] like Figure 7 As shown, the embodiment of the present invention provides a system 800 for navigating container unmanned vehicles using port lights, including a receiving device 820, a ground light control device 810, and a ground light 630. The receiving device 820 and the ground light 810 Connect with the ground lamp control device 810;
[0058] The receiving device 820 is used to receive the driving path information of the port container unmanned vehicle and the identification information of the port container unmanned vehicle, and send the driving path information of the port container unmanned vehicle and the identification information of the port container unmanned vehicle to the ground light control Device 810; the ground lamp control device 810 is used to determine the position information of the ground lamp that needs to flash according to the driving path information of the port container unmanned vehicle, and determine the flashing color information, flashing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More