

Automatic driving-orientated vehicle longitudinal positioning system and method using variable grid-based image feature detection
A technology of automatic driving and image features, which is applied in satellite radio beacon positioning systems, radio wave measurement systems, image enhancement and other directions, and can solve the problems of low output frequency of positioning information, inability to output high frequency, and low frame rate of image processing. , to achieve the effect of improving the positioning accuracy of the self-vehicle, correcting the longitudinal error, and reducing the computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the above objects, features and advantages of the present invention more comprehensible, specific implementations of the present invention will be described in detail below in conjunction with the accompanying drawings.
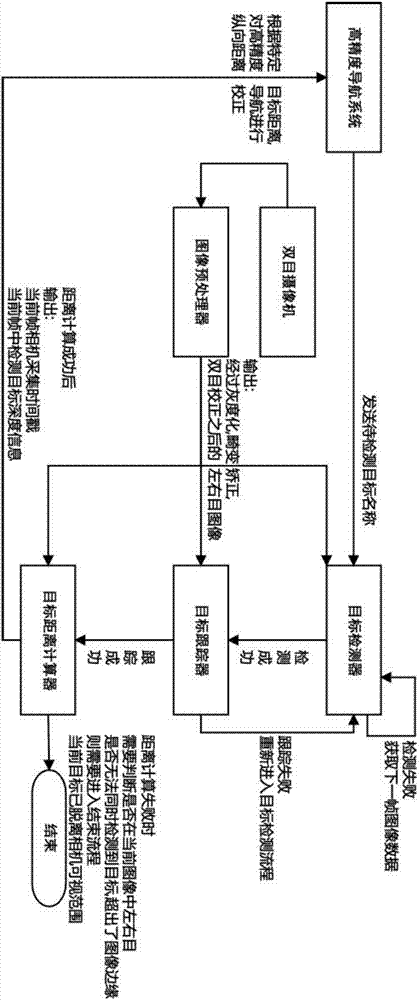
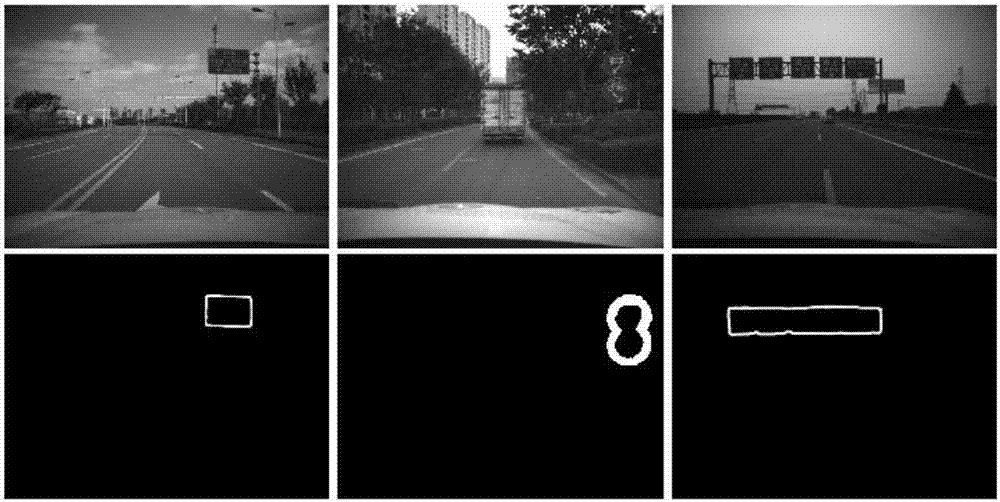
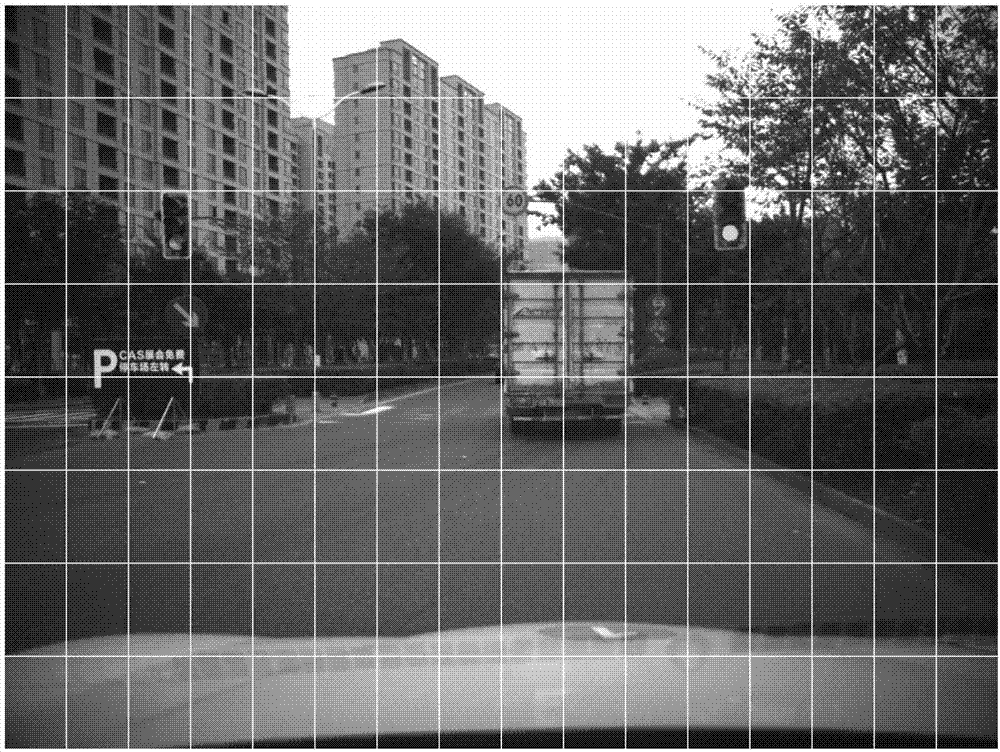
[0034] The invention provides an image feature detection algorithm based on a variable grid, by installing the camera in the automatic driving system to collect the surrounding images of the vehicle, and inputting the information about the specific scene target and the high-level information given by the high-precision navigation system The target distance calculated by the road in precision navigation, by applying a feature extraction algorithm based on variable grid area size (carrying scale information), can retrieve a specific front target in the vehicle binocular vision system, and output the vision system to The distance to the target ahead. According to this distance information and the physical location where the binocular syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More