

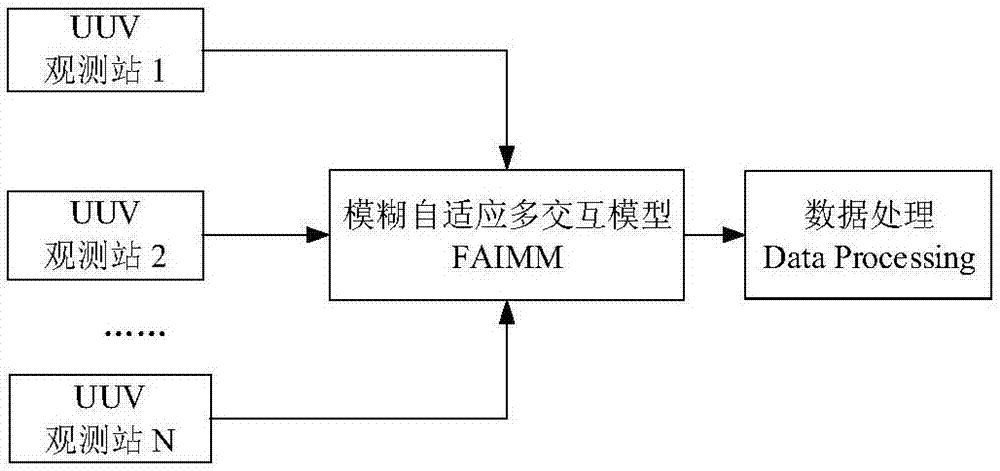
Multi-UUV (Unmanned Underwater Vehicle) cooperative system underwater target tracking algorithm for fuzzy adaptive interacting multiple model (FAIMM)
A fuzzy self-adaptive, underwater target technology, used in radio wave measurement systems, sound wave re-radiation, and utilization of re-radiation, etc. Reduce disordered competition, high filtering accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
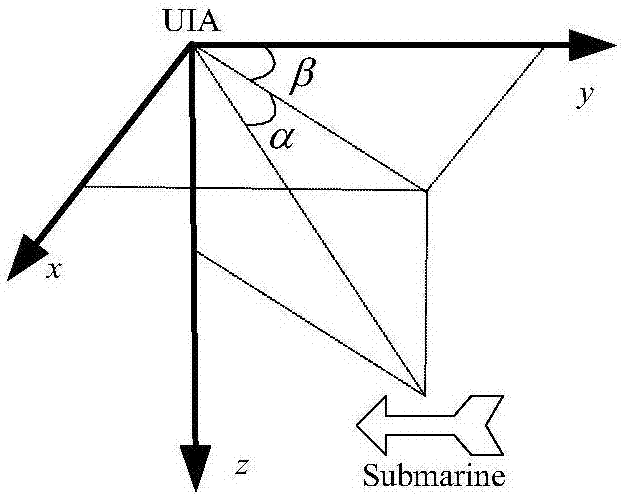
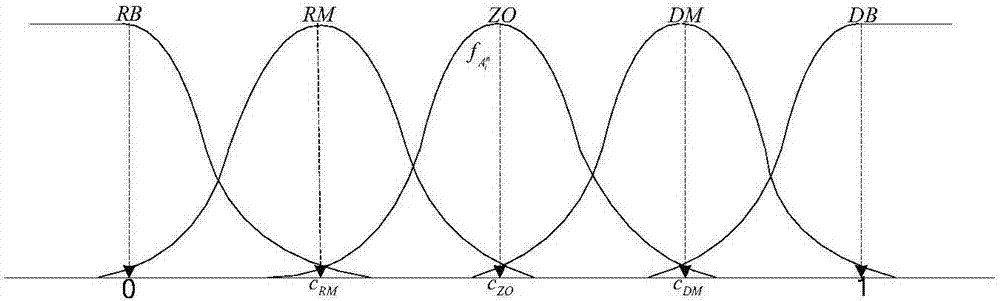
[0049] In this embodiment, first, based on the principle of purely azimuth target tracking of the multi-UUV cooperative system, a discrete nonlinear state and observation equation of the target tracking system is established. Secondly, according to the characteristics of the underwater target movement, combined with the constant velocity model (CV), constant acceleration model (CA), coordinated turn model (CT), Singer model (SG) and "current" statistical model (CS) and other commonly used five According to the analysis of the dynamic state transition matrix, the coupling inequality relationship between the five models is proposed, and the motion model set (Motion Mode Set, MMS) suitable for underwater target tracking is optimally selected. Thirdly, the interme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More