

Wearable exoskeleton lower limb rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of rehabilitation robots, can solve the problems of limb and joint deviation, affecting the effect of rehabilitation treatment, and less freedom of the wearable rehabilitation robot, so as to reduce the probability of joint dislocation and promote the effect of recovery.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with accompanying drawing and specific embodiment the present invention will be described in further detail:
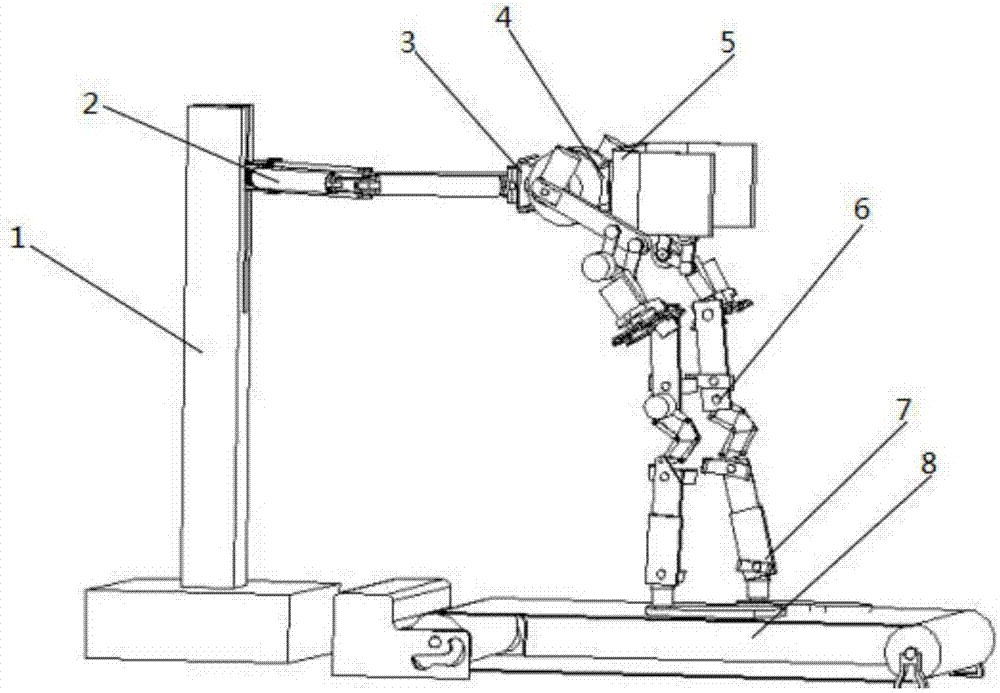
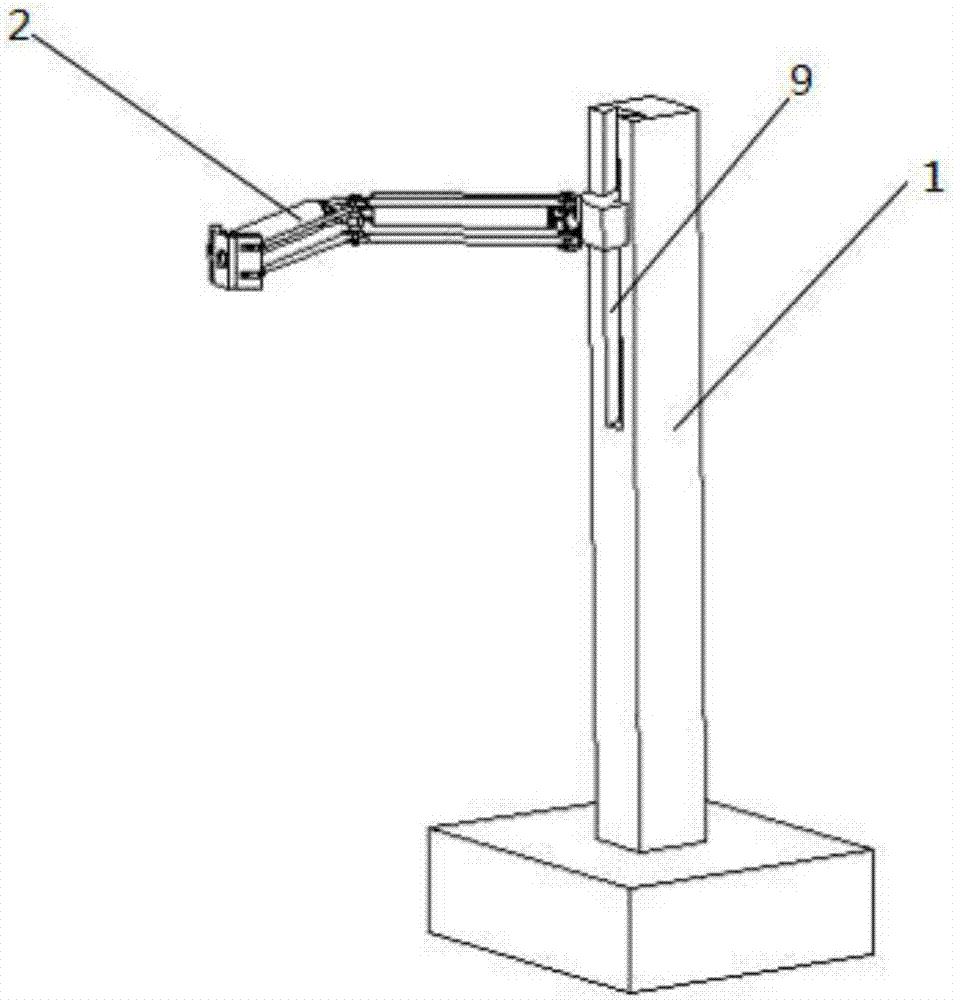
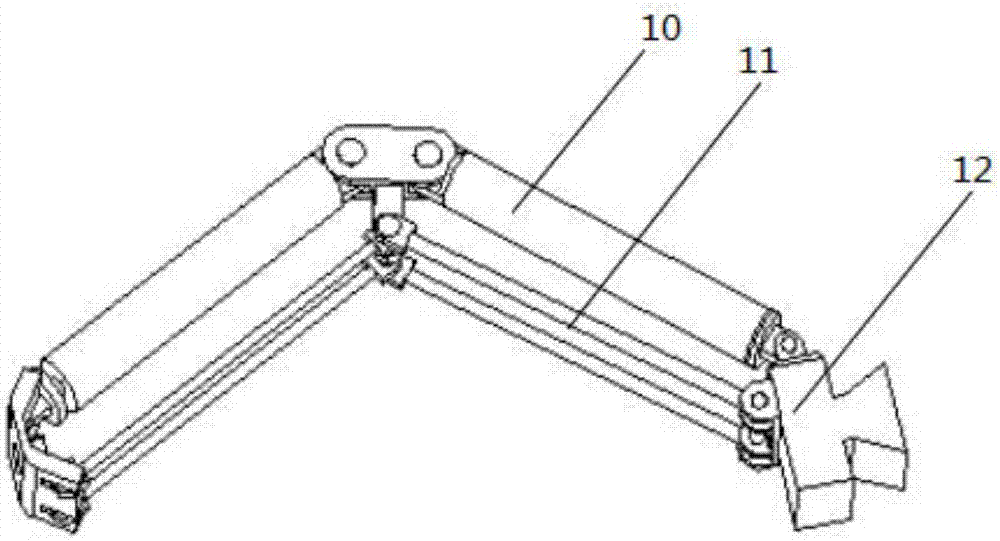
[0021] The present invention comprises support mechanism, frame 1, hip joint self-adaptive structure 5, knee joint self-adaptive structure 6 and ankle joint structure 7; Described support mechanism comprises mechanical footboard support and waist hip support, and described mechanical footboard support is a running Machine 4, the waist and crotch support includes a horizontal linkage mechanism 2 and a frame 1, the left end of the horizontal linkage mechanism 2 is installed into the chute 9 through a component 12 to realize a flexible connection with the frame 1, and the right end is connected to the first The frame 3 is hinged and fixed, and the first connecting frame 3 is fixedly connected to the mounting seat, which is composed of two symmetrical circular plates 13. The first connecting frame 3 is fixedly connected to the rear end of the ci...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More