

Task planning method of multistatic heterogeneous unmanned aerial vehicle cooperative reconnaissance
A mission planning and unmanned aerial vehicle technology, which is applied in the direction of artificial life, instruments, computing models, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
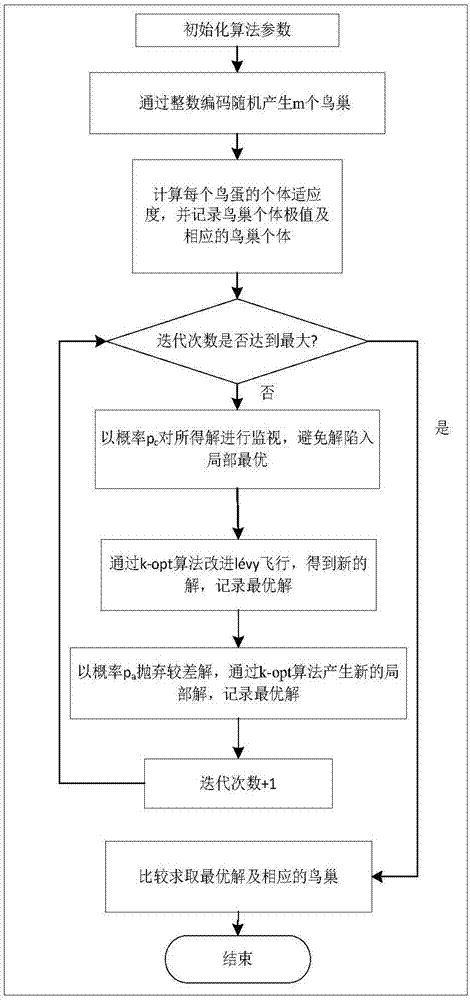
[0096] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0097] Step 1: Build a multi-base multi-heterogeneous UAV reconnaissance mission model
[0098] In this step, define as follows:
[0099] Definition 1: Set uavType={1,2,…,i,…,N t}, uavType represents the set of UAV types, where N t ∈ N + , N + is a set of non-zero natural numbers, N t Represents the number of UAV types, element i in the set represents the i-th UAV;
[0100] Definition 2: Let tarType={1, 2, ..., h, ..., N c}, tarType represents the set of target types, where N c ∈ N + , N c Indicates the number of target types, and the element h in the set represents the hth type of target;
[0101] Definition 3: Let Tar={1, 2, ..., j, ..., M}, Tar represents the target set, where M∈N +, M represents the number of targets, and element j in the set represents the jth target;
[0102] Definition 4: Let Base={1, 2, ..., k, ..., L}, Base represen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More