

Intelligent robot with high service level
An intelligent robot and service-level technology, applied in the field of intelligent robots, can solve problems such as image retrieval difficulties, achieve good recognition performance and improve service levels
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention is further described in conjunction with the following examples.
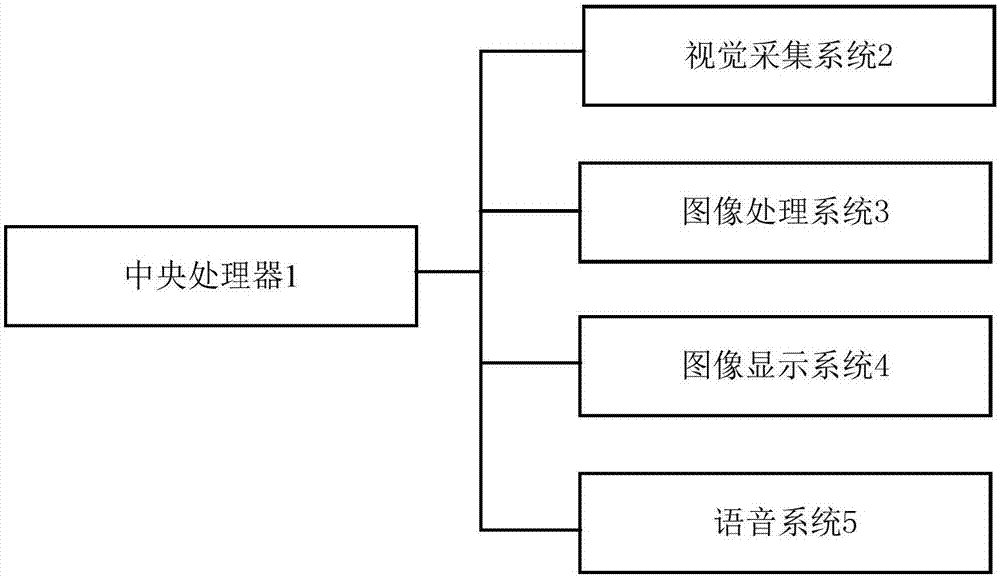
[0013] see figure 1 , a kind of intelligent robot with high service level of the present embodiment includes a central processing unit 1, a visual acquisition system 2, an image processing system 3, an image display system 4 and a voice system 5, and the central processing unit 1 is connected with the visual The acquisition system 2, the image processing system 3, the image display system 4 and the voice system are electrically connected 5, and the central processing unit 1 is used to manage the visual acquisition system 2, the image processing system 3, the image display system 4 and the voice system 5, The visual collection system 2 is used to collect images, the image processing system 3 is used to recognize the collected images, the image display system 4 is used to display the recognition results, and the voice system 5 is used to broadcast the recognition results .
[0014] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More