Pure language processing method and device based on multiple tasks
A language processing and multi-tasking technology, applied in speech analysis, speech recognition, instruments, etc., can solve the problems of multi-person interaction, robot interaction, low real-time interaction, and inability to effectively interact in real time, so as to achieve the effect of improving real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
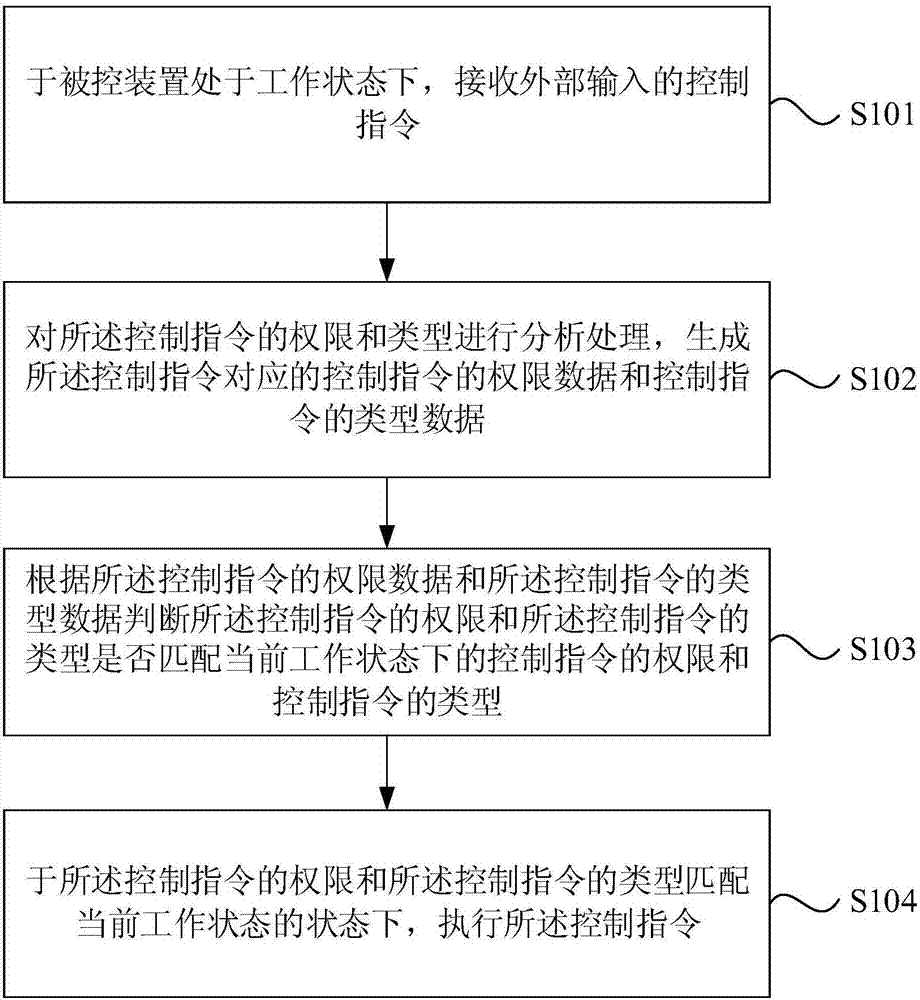
[0032] figure 1 It is a schematic flow chart of a multi-task-based pure language processing method provided in Embodiment 1 of the present invention. The method can be executed by a multi-task-based pure language processing device, and the device can be implemented by software and / or hardware. like figure 1 As shown, the method includes:
[0033] S101. When the controlled device is in a working state, receive an externally input control instruction.
[0034] Generally, the controlled device can be in the standby state, and when the controlled device enters the working state, it receives an external control instruction through an external input device in the controlled device. Wherein, the working state of the controlled device can be understood as the starting state of the controlled device, and can also be understood as the state that the controlled device is executing a control instruction. For example, after the robot is started, it can receive and process an external co...
Embodiment 2
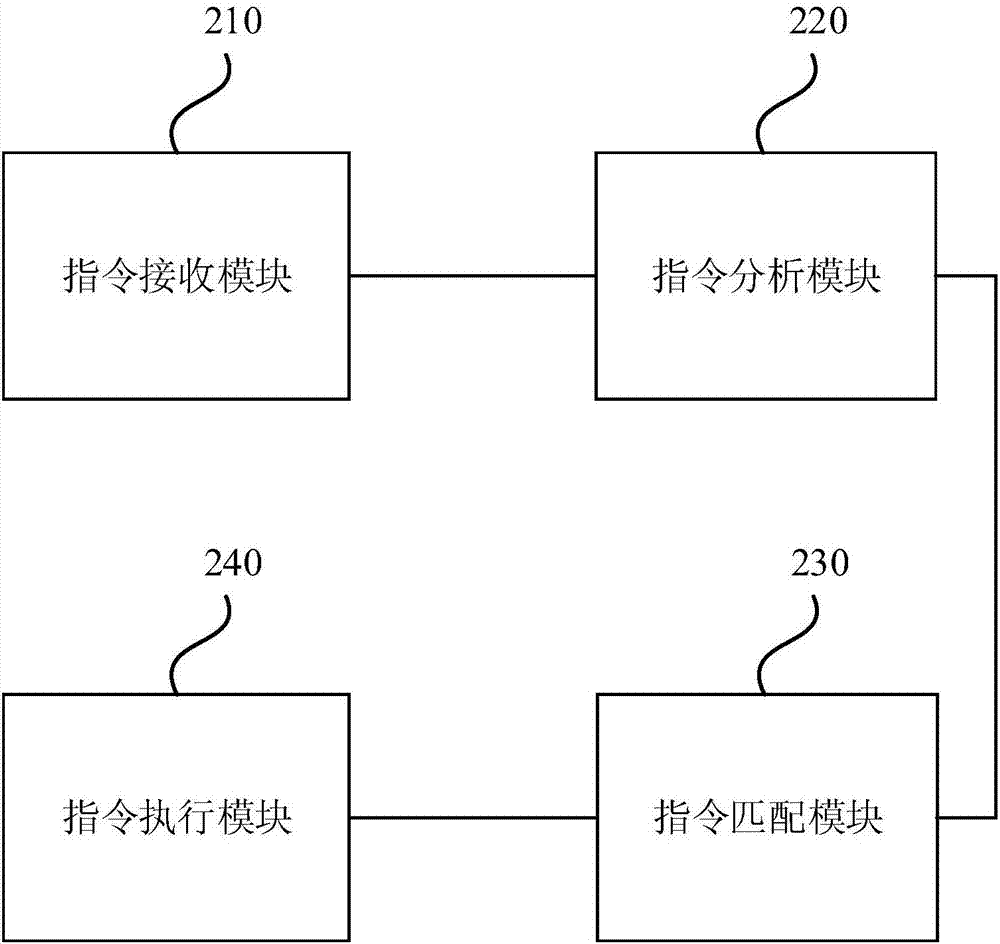
[0055] figure 2 is a schematic structural diagram of a multi-task-based pure language processing device in Embodiment 2 of the present invention, as shown in figure 2 As shown, the pure language processing device based on multitasking includes:
[0056] An instruction receiving module 210, configured to receive an externally input control instruction when the controlled device is in a working state;
[0057] An instruction analysis module 220, configured to analyze and process the authority and type of the control instruction, and generate authority data and type data of the control instruction corresponding to the control instruction;
[0058] An instruction matching module 230, configured to judge whether the authority of the control instruction and the type of the control instruction match the authority and control of the control instruction in the current working state according to the authority data of the control instruction and the type data of the control instructio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com