

A joint stiffness modeling method for industrial robots considering contact
An industrial robot, joint technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The following is attached Figure 1-6 This method is further described; a joint stiffness modeling method of an industrial robot considering contact, the implementation steps of the method are as follows,
[0019] S1 establishes the equivalent system of each joint of the robot
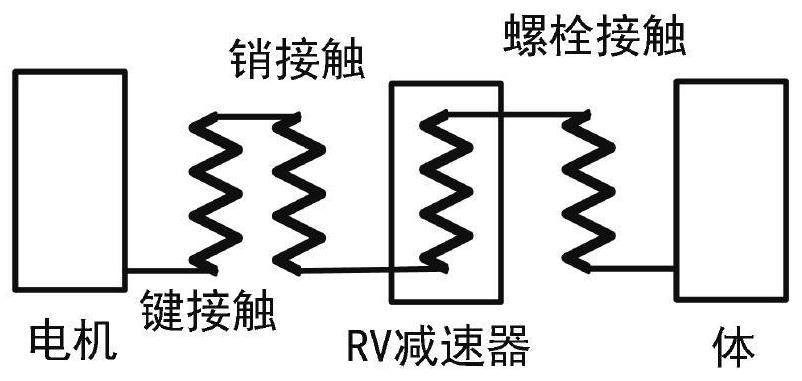
[0020] Such as figure 1 As shown, the key contact parts and reducer parts of a six-axis industrial robot are equivalent to a spring structure with a certain torsional stiffness. The joint structure of the six-axis industrial robot includes contacts in the key connection, bolt connection and pin connection structure. In addition, the torsional stiffness of the reducer is one of the important components of the overall stiffness of the joint. As a mature key part in the actual six-axis industrial robot system, the torsional stiffness K red Confirm by querying the product manual.
[0021] S2 Calculation of 3D surface fractal parameters and surface roughness parameters
[0022] Taking the soft ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More