

A Spatial Position and Attitude Calculation Method for Overall Target Optimization
A technology of spatial position and spatial attitude, which is applied in maintenance, automobile production, and service fields, and can solve problems such as large deviations in fitting, loss of intermediate data, and poor accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
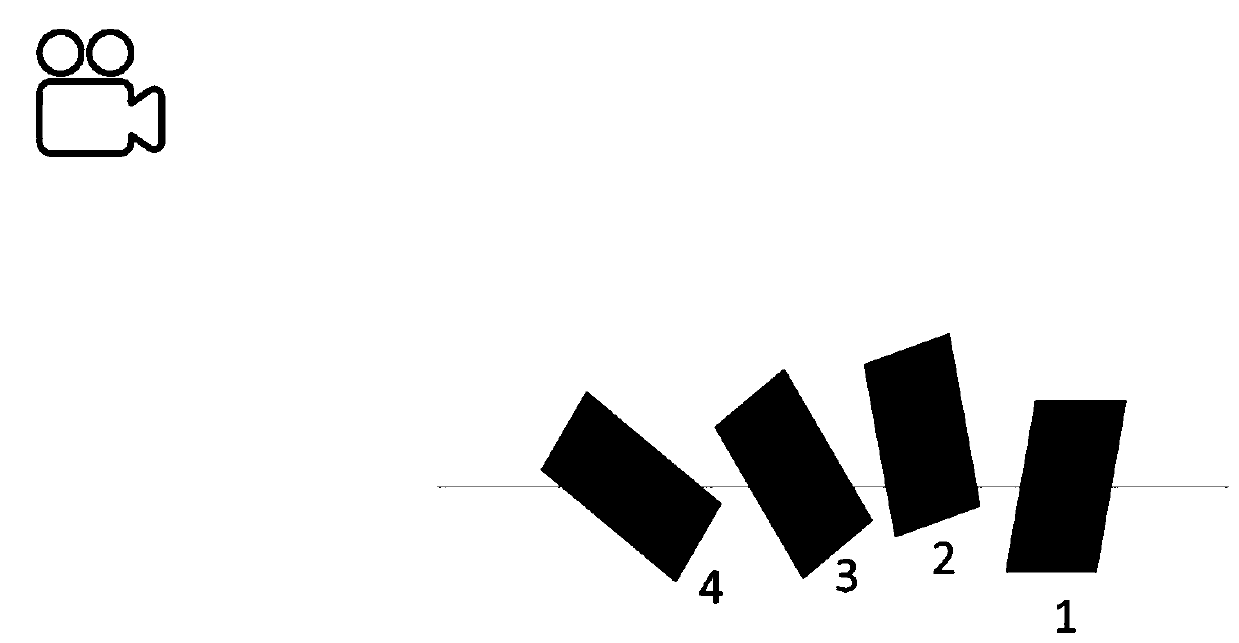
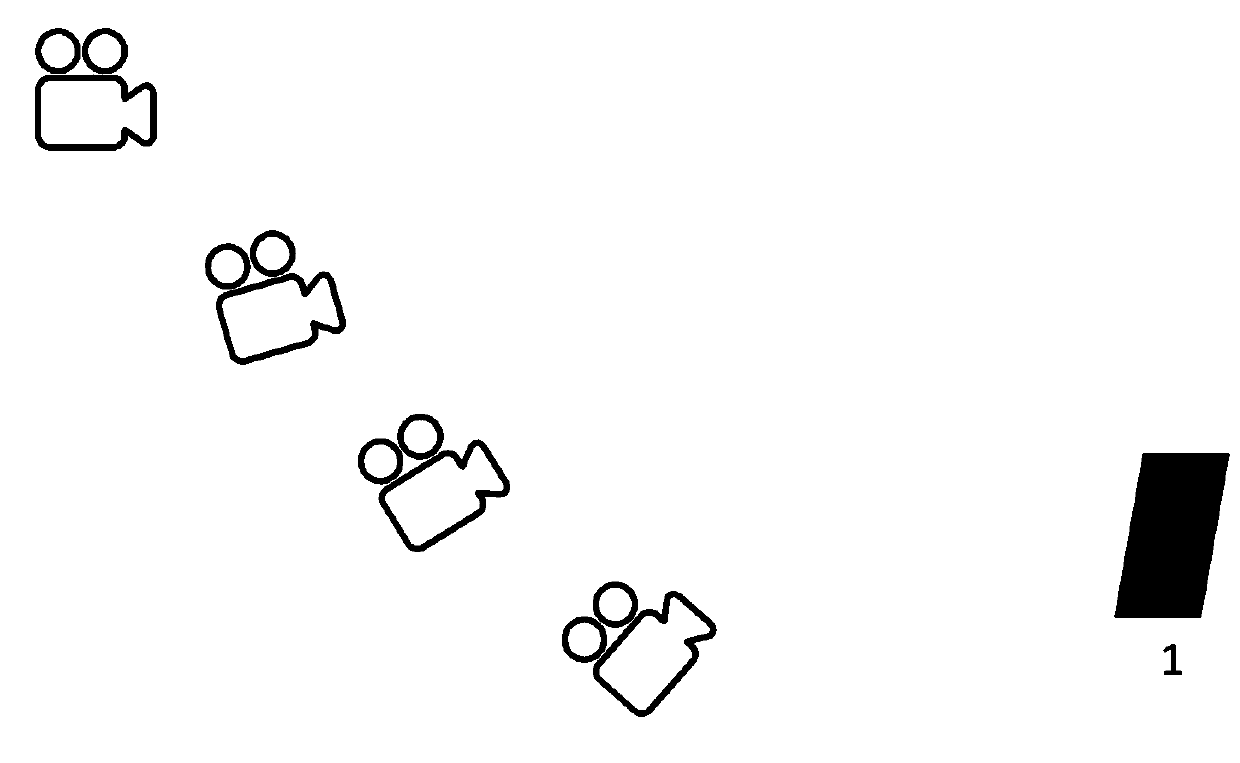
[0074] Such as figure 2 As shown, multiple image sequences are formed during the movement of a target, where it is assumed that the target moves from state 1 to state 4, and the camera position does not change, such as image 3 As shown in , where the vehicle partially shakes in the position of state 2, and the spatial position and posture of the target change, it is necessary to optimize its spatial position and eliminate the target sequence with a large error, so as to realize the accurate accuracy of the target. Positioning and posture.
[0075] Such as Figure 5 As shown, a method for solving the spatial position and attitude of the overall optimization of the target comprises the following steps:
[0076] 1) Obtain the imaging point data of the target, including the spatial attitude R of the target i , space position T i , the coordinates (u, v) of the image of the target after imaging, and the coordinate values (X, Y) of the actual space of the target;
[0077] 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More