

Four-wheel independent-drive mobile robot with anti-shock function
A four-wheel independent drive, mobile robot technology, applied in the direction of electric steering mechanism, motion deposition, power device, etc., can solve the problem of insufficient obstacle avoidance ability of mobile robots, and achieve the effect of increasing applicable occasions, flexible movement, and precise movement trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
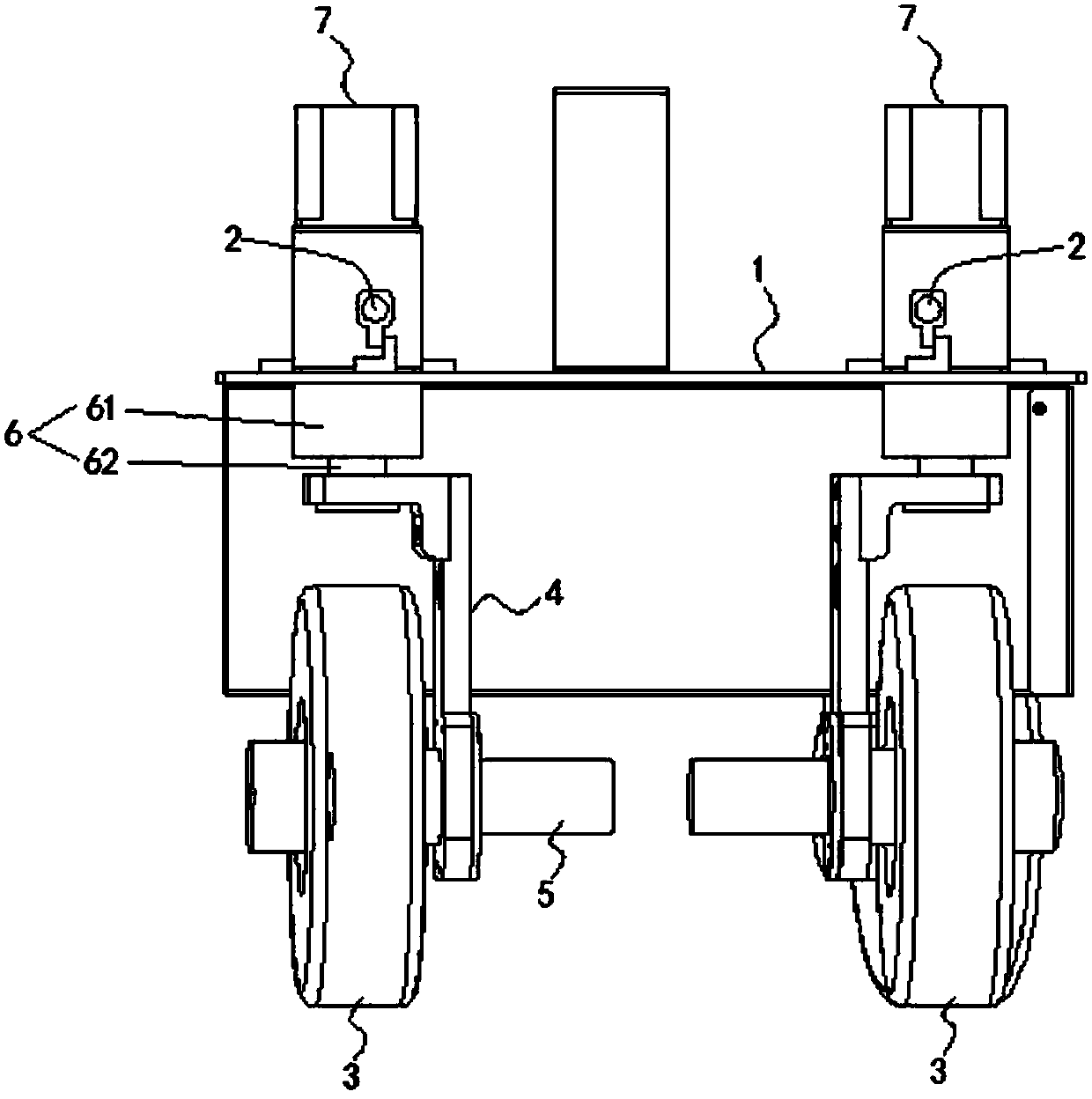
[0016] Such as figure 1 As shown, the four-wheel independent drive mobile robot with shockproof function of this embodiment includes a controller, a chassis 1, a wheel assembly, an absolute encoder and an ultrasonic sensor 2;
[0017] Chassis 1 is used to carry goods to be transported or install other equipment; four roller assemblies are installed under chassis 1;
[0018] The roller assembly includes a roller 3, a bracket 4, a driving motor 5, a hydraulic cylinder 6 and a steering motor 7, the driving motor 5 and the roller 3 motor are installed on the bracket 4, the driving motor 5 drives the roller 3 to rotate, and the driving motor 5 is installed on the roller 3 The inner side (that is, the position between the same row of rollers 3), reduces the occupied space of the whole mobile robot;
[0019] The support 4 is installed below the chassis 1 through the hydraulic cylinder 6, and the steering motor 7 is installed on the chassis 1; the hydraulic cylinder 6 includes a body...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More