

An Underwater Localization Method for Indoor Confined Structured Waters
An underwater positioning and structuring technology, applied in navigation, instrumentation, surveying and mapping, and navigation, etc., can solve problems such as the inability to achieve high-precision positioning in small indoor pools
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0034] Embodiment 1: The specific process of an underwater positioning method for indoor restricted structured waters in this embodiment is as follows:
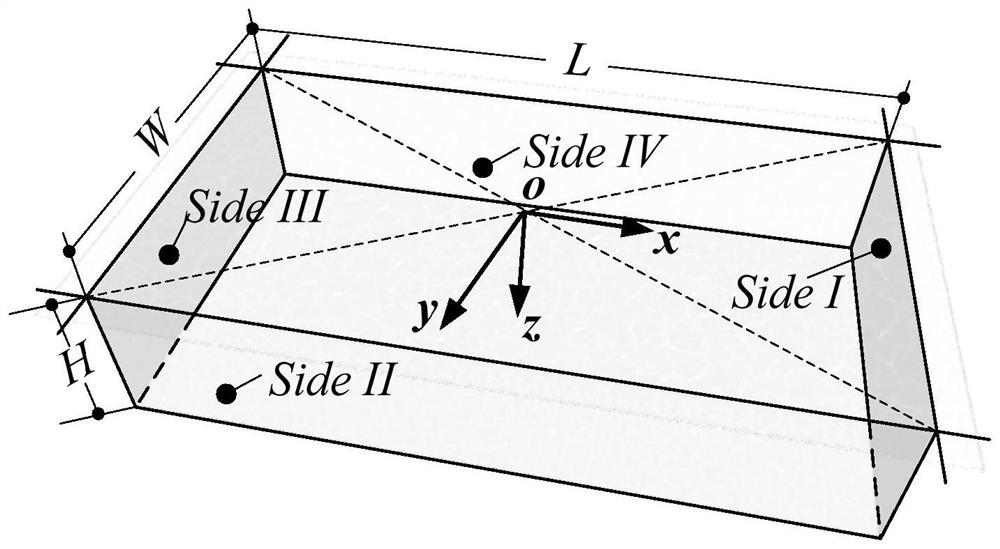
[0035] Step 1. According to the yaw angle of the underwater robot, the earth coordinate system O-xyz is rotated by β angle to obtain a new coordinate system O-x′y′z′;
[0036] Step 2. According to the new coordinate system O-x'y'z' obtained in step 1, the pool wall is represented as R, B, L, U in O-x'y'z' in turn, where the positive direction of the x' axis corresponds to the pool wall R , the positive direction of the y' axis corresponds to the pool wall B, the negative direction of the x' axis corresponds to the pool wall L; the negative direction of the y' axis corresponds to the pool wall U;
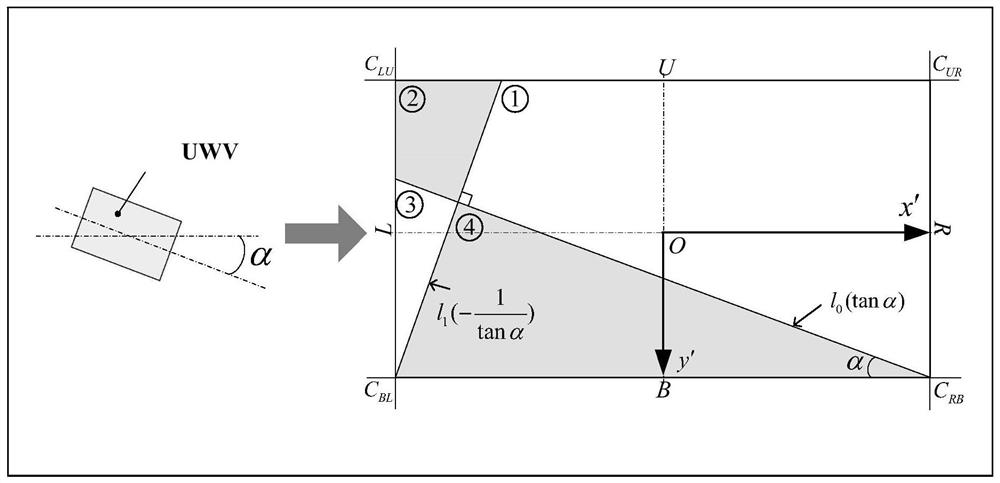
[0037] past point C RB Draw a straight line l with slope tanα 0 ; then past point C BL make a straight line l 0 vertical line l 1 , the slope is -1 / tanα; l 0 with l 1 Divide the pool plane x'Oy' (the plane surrounded by the p...
specific Embodiment approach 2
[0042] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in the first step, the earth coordinate system O-xyz is rotated by an angle of β according to the yaw angle of the underwater robot to obtain a new coordinate system O-x'y' z′; the specific process is:
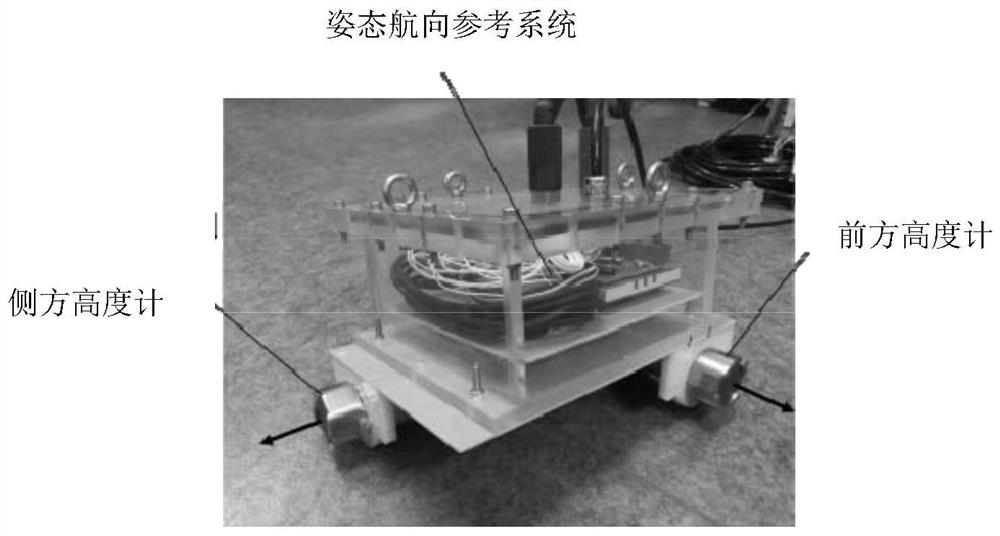
[0043] Aiming at the problem that it is difficult to accurately locate indoor confined waters in spent fuel pools, a new underwater positioning method combining attitude and heading reference system and altimeter is proposed. Such as figure 1 As shown, two altimeters are installed on the front and side of the fuselage respectively, forming an included angle of 90°. The Attitude Heading Reference System (AHRS) is installed in the cabin to detect the attitude of the aircraft.
[0044] The attitude of the underwater robot is expressed as Γ=[φ,θ,ψ] T , where φ is the roll angle, θ is the pitch angle, and ψ is the yaw angle; the distance data measured by the two altimeters are...
specific Embodiment approach 3
[0067] Specific embodiment 3: The difference between this embodiment and specific embodiment 1 or 2 is: the new coordinate system O-x'y'z' obtained according to step 1 in said step 2, and the pool wall is in O-x'y'z' Expressed as R, B, L, U in turn, where the positive direction of the x' axis corresponds to the wall surface R of the pool, the positive direction of the y' axis corresponds to the wall surface B of the pool, the negative direction of the x' axis corresponds to the wall surface L of the pool, and the negative direction of the y' axis corresponds to the wall surface of the pool U; past point C RB Draw a straight line l with slope tanα 0 ; then past point C BL make a straight line l 0 vertical line l 1 , the slope is -1 / tanα; l 0 with l 1 Divide the pool plane x'Oy' (the plane enclosed by the pool walls R, B, U, L) into four areas; the specific process is:
[0068] In O-x'y'z', as in image 3 As shown, after point C RB Draw a straight line l with slope tanα ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More