

A vertically flexible telescopic knee joint that can be used as a robot leg
A technology of robot legs and knee joints, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that flexible robots cannot be applied, and achieve the effect of realizing vertical expansion and contraction characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
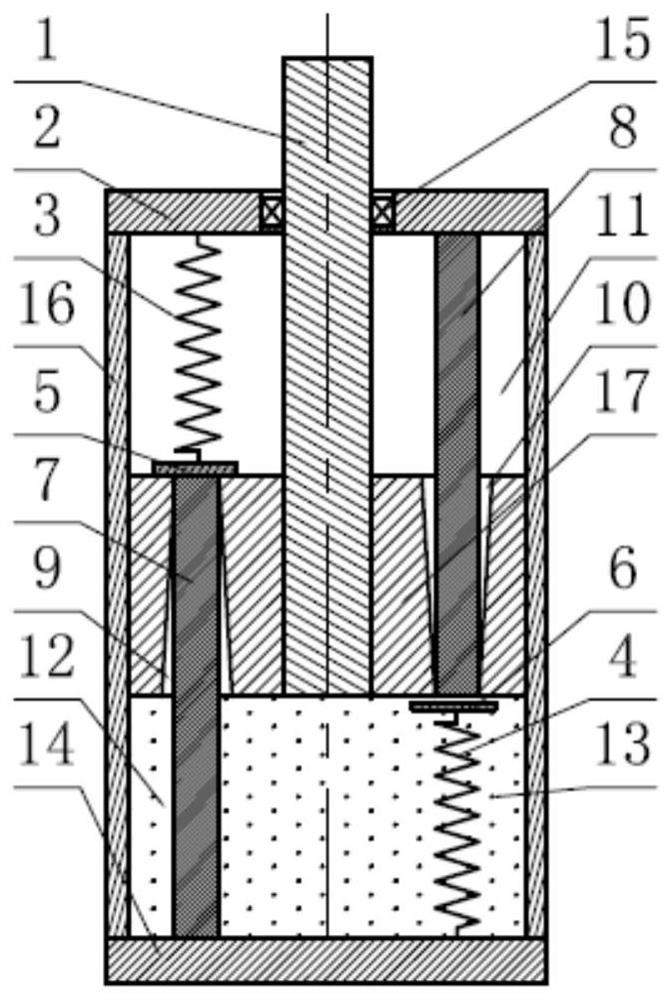
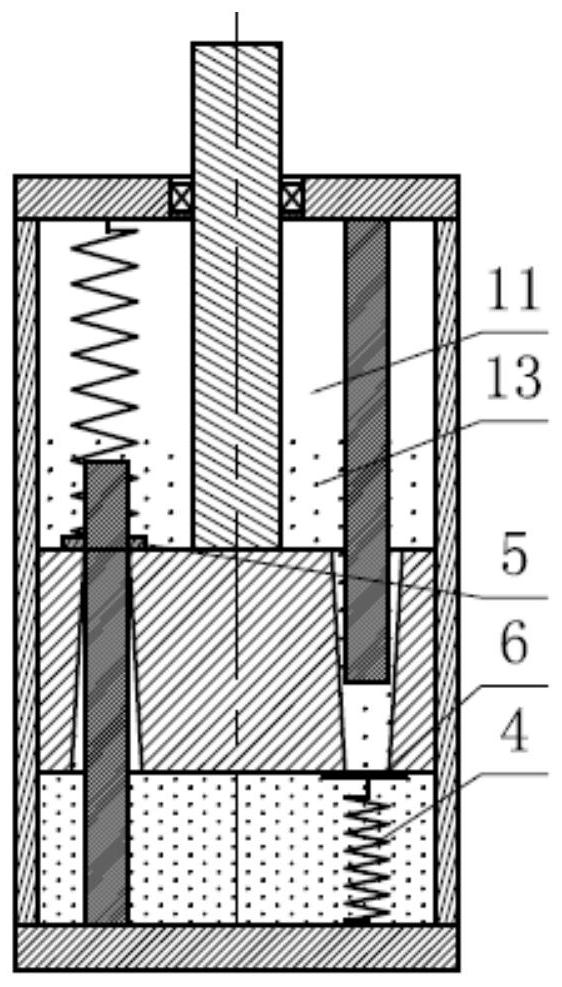
[0017] see figure 1 and figure 2 As shown, a kind of vertically flexible telescopic knee joint of the present invention that can be used as robot leg comprises femur 1, tibia 16 of hollow barrel shape, tibial cap A2 and tibial cap that are respectively arranged on the upper and lower ends of tibia 16 B14, the femoral piston 17 which is installed inside the tibia 16 and can slide freely, is respectively installed on the tibial cover A2 and the tibial cover B14, and is located on the lower guide post 7 and the upper guide post 8 inside the tibia 16; it is characterized in that: The initial position of the femoral piston 17 is located in the middle of the tibia 16, and the tibia 16 is divided into two parts: the upper tibial cavity 11 and the lower tibial cavity 12; The forward tapered gap 9 and the reverse tapered gap 10; the two tap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More